����-�e��-�ֿ�������������ƽ�60�����Ժ��Ա���������?c��)ڹ��I(y��)�^�̿����е�����(d��o)��λ��
����
������18���o(j��)�ԁ���ؓ(f��)����һֱ�������B�m(x��)�^�̿��ơ�James Watt�����w���{(di��o)�����������������������C(j��)���\(y��n)�D(zhu��n)�ٶȣ���(d��ng)�����C(j��)�ٶȽ���̫�͕r(sh��)�����w���{(di��o)�������Ԅ�(d��ng)��������������(d��ng)�ٶ�����̫�ߕr(sh��)�t���w���{(di��o)������p��������
�����@�N��(ji��n)�ε�ƽ���(d��ng)�������ˮ�(d��ng)���^�̿��Ƶ�һЩ�������ܼ����y(c��)���^��׃�������O(sh��)���c(di��n)�Ϝpȥ׃���ԫ@���`��Լ����`������r(sh��)�\(y��n)�ÿ��������(q��)��(d��ng)�^��׃�����ӻ����`���ؓ(f��)�r(sh��)�(q��)��(d��ng)�^��׃���p�٣��@�N�^���؏�(f��)�M(j��n)��ֱ���`��������
�����������O(sh��)Ӌ(j��)�еľ���֮̎����Ӌ(j��)���ÿ�N��r�¿����������^��ʩ�Ӷ���У����������������ֻ�Ǻ�(ji��n)�ε،��`�����һ��(g��)����(sh��)��Ӌ(j��)��������һ��ݔ������Watt�O(sh��)Ӌ(j��)���w���{(di��o)�������t�Ǹ���(j��)���O(sh��)��γߴ缰���{(di��o)�̶��ݽzλ�����_���ij���(sh��),���ԙC(j��)е��ʽ������@�N���ơ�
���������ҵ��ǣ���(d��ng)�����������(q��)��(d��ng)�^��׃�����ӽ��O(sh��)���c(di��n)�r(sh��)�������˳���������ͣ����һ��(g��)ʹ�`���С���s�����ֵ�Ĺ̶�ݔ���ϡ����P(gu��n)�˷N��(w��n)�B(t��i)�`��F(xi��n)��ĸ�Ԕ��(x��)��ጣ�Ո(q��ng)��ҊCONTROL ENGINEERING 2000��6�¿����˽�PID���ơ�һ�ġ� �����e������
����20���o(j��)30����Ŀ��ƹ��̎����l(f��)�F(xi��n)���`���ͨ�^�Ԅ�(d��ng)���O(sh��)���c(di��n)���O(sh��)��һ��(g��)�˞��ֵ��������ȫ�������@һ��������������������һ��(g��)�˹��O(sh��)���c(di��n)���Ķ�ʹ��(sh��)�H�`���ڿ�����ֹͣ�����r(sh��)���㣬�@��(sh��)�H�����ڌ�(sh��)�H�`�����r(sh��)��ͨ�^�����������ͣ�ԓ�˹��O(sh��)���c(di��n)��ʹ�`����㡣
������(d��ng)�l(f��)���r(sh��)���@�N�Ԅ�(d��ng)���O(sh��)������(du��)�ڌ�(du��)�`��e�֡���?q��)���ȫ�����ӵ������������?xi��ng)ݔ���ж��ԣ��ڔ�(sh��)�W(xu��)�Ͼ���ͬ�ӵ�Ч������Y(ji��)������һ�N���^�m(x��)�����`������ݔ����ֱ���`����ȫ�����ġ������e�֡���PI����������
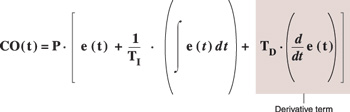 �����D1�����y(t��ng)��PID��ʽͨ�^��(du��)�`����̖(h��o)�M(j��n)���ց�Ӌ(j��)�����(xi��ng)��e(t) = SP(t) - PV(t)������PV(t)��t�r(sh��)�̵��^��׃����SP(t)���O(sh��)��ֵ��CO(t)���������ȫ��ݔ����P��TI��TD �t�քe�鶨�x�������e�ּ����(xi��ng)�ġ���������(sh��)����
���������ҵ��ǣ��e�����ò����ܱ��C��(sh��)�F(xi��n)�����ķ������ơ�����e�������^��(qi��ng)���tPI�������������� ���]�h(hu��n)����(w��n)��������ҊCONTROL ENGINEERING 2000��5�¿� ��������������]�h(hu��n)��(w��n)���ԁ�ƽ�����ܡ�һ�ģ���������Ҳ���܌�(du��)�`���M(j��n)�С��^У�������Ķ������µġ���������ķ����`���(d��ng)�l(f��)���@�N��r�r(sh��)����������K���ڡ���ȫ�_��������ȫ�P(gu��n)��֮�g�����(q��)��(d��ng)��ݔ�������_ʼ���F(xi��n)���^�ġ���ʎ���F(xi��n)��
 �����D2���ڴ����У�����O(sh��)���c(di��n)�H�Բ��M(j��n)�ķ�ʽ��׃���t�֟oՓ���Ӷ������Ǟ��㣬��˿�ͨ�^��(du��)�^��׃��ؓ(f��)���L(zh��ng)��(d��o)��Ӌ(j��)�������á� ����������
������ʎ�Еr(sh��)��ͨ�^������̖(h��o)���������Á����ԳC����ȫ������-�e��-�֡���PID���������е����(xi��ng)��ֻ�����`���׃�r(sh��)�������á�����O(sh��)���c(di��n)�鳣��(sh��)���tֻ�����^��׃���_ʼ�����x�_���O(sh��)���c(di��n)�r(sh��)�`����_ʼ��׃�����@��ǰ��Ŀ�����ʹ�^��׃���ӽ��O(sh��)���c(di��n)̫��r(sh��)�������á���ˣ����������ṩ�Ĝp�����ÿɜp�ٮa(ch��n)�����{(di��o)����ʎ�Ŀ����ԡ�
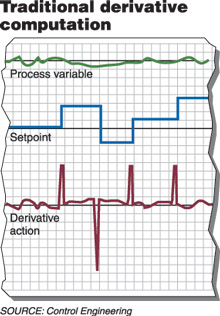 �D3��ֻҪ�O(sh��)���c(di��n)ͻ׃�����`����̖(h��o)��Ӌ(j��)�����(xi��ng)����������������ɼ�塣 �D3��ֻҪ�O(sh��)���c(di��n)ͻ׃�����`����̖(h��o)��Ӌ(j��)�����(xi��ng)����������������ɼ�塣 �������ҵ��ǣ�����������^��(qi��ng)���t�������ڜp��̫�����������������ʎ���@�N�F(xi��n)����һЩ��(du��)���Ʒ���(y��ng)�dz��`�����^�̿����У�����늙C(j��)��C(j��)���˵ȣ��Ȟ����@��
������(d��ng)���O(sh��)���c(di��n)ʹ�`��l(f��)��ͻ׃�r(sh��)��������Ҳڅ����ʹ������ݔ���Юa(ch��n)�����@�ġ���塱��ͻ���������@��ʹ�������o��ȴ��e�ֻ����������Ч���_ʼ���̲�ȡУ���Є�(d��ng)���cֻ�Ѓ��(xi��ng)��PI��������ȣ�ȫPID�������������A(y��)�y(c��)���^��׃�����������O(sh��)���c(di��n)������������Ĵ�С����(sh��)�ϣ���(d��ng)Tayor��˾������Fulscope�������״���ȫ���(xi��ng)�Ƴ��r(sh��)��߀ֻ�����(xi��ng)��(bi��o)�顰�A(y��)-���á���
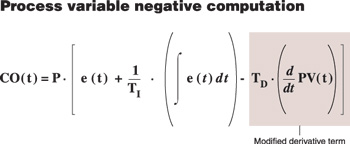
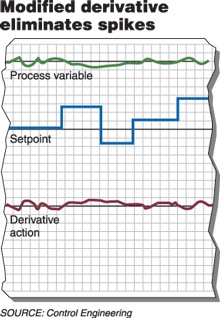 �����D4����������������(xi��ng)���������O(sh��)���c(di��n)��׃�r(sh��)�������������F(xi��n)�ļ�塣������O(sh��)���c(di��n)�ڲ��M(j��n)��׃֮�g����(d��ng)���t�ĺ�����(xi��ng)���a(ch��n)���e(cu��)�`�ĽY(ji��)���� �����ֵ�ȱ��
������һ���棬�������Ą��Ҕ[��(d��ng)����һЩҪ�������ݔ���M(j��n)�о�������(w��n)��׃���đ�(y��ng)�ã������Ҝؿ��Ƶȣ���׃�÷dz����ˡ��Ԅ�(d��ng)�{(di��o)����ÿ���{(di��o)�������a(ch��n)���ğ��L(f��ng)�����Hʹ���ݾ�ס�ߺܲ����������Ҳ��(hu��)�s�̲�ů�t������{(di��o)����ʹ�É�����
������(du��)�ڴ��(y��ng)�ã����������������������ã����ߏ�ؓ(f��)�^��׃����������ֱ�ӏ��`��Ё�Ӌ(j��)�����(xi��ng)������O(sh��)���c(di��n)�鳣��(sh��)���t�ɷNӋ(j��)��Y(ji��)����ͬ������O(sh��)���c(di��n)�H�Բ��M(j��n)��ʽ����׃���t��ÿһ���M(j��n)�_ʼ�r(sh��)���⣬�ɷNӋ(j��)��Y(ji��)���Ԍ�һ�¡��^��׃��ؓ(f��)��(d��o)��(sh��)��ؓ(f��)�֣�������(hu��)���`��������ɼ�壬�P(gu��n)�ڴ��c(di��n)��Ո(q��ng)��Ҋ����ƽ���������á�һ�D��Ŀǰ�����(sh��)�F(xi��n)�����������ܞ齛(j��ng)����ͻ�����đ�(y��ng)���ṩ����x�(xi��ng)��
���������Ì�(du��)��һЩ��(du��)���������^��Ҫ��đ�(y��ng)�Á��fҲ��һ��(g��)���}����(d��ng)�^��׃��ÿ�Μ�(zh��n)���׃�r(sh��)�����(xi��ng)����(hu��)��(du��)��������ݔ���a(ch��n)��Ӱ푡���ʹ��(sh��)�H���^��׃���ѽ�(j��ng)�_(d��)���O(sh��)���c(di��n)��������Ҳ����߀��(hu��)��У��ݔ������ˣ���(sh��)�H�����ЬF(xi��n)�������������ОV���x�(xi��ng)���Ԟ����(xi��ng)�ṩ����ƽ����ݔ�롣
������֮�������ñ�������ƹ��̎��J(r��n)����ȱ�ݶ��ڃ�(y��u)�c(di��n)��������ˣ���50������ڣ������ġ�����- �e��-�֡���PID���������ѳɞ�һ�N���M(j��n)�ļ��g(sh��)��ֱ���������Ա��������^�̿����I(l��ng)��������(d��o)��λ����(du��)�ڴ����(sh��)�^�̿��Ƒ�(y��ng)�Á��f��PID�ѽ�(j��ng)���ʹ�ã����û��������ã���������(du��)�^����(sh��)�F(xi��n)�����������ԭ��Ҳ���ױ������⡣ ����PID�����e��
�����F(xi��n)���҂�?c��)ٻص��Ҝؿ������ӡ�������g�ܴ����ů�t�ֺ�С���t�^�̌��A���ڌ�(du��)�������Ŀ����M(j��n)�о���푑�(y��ng)��������������_����������r(sh��)�{(di��o)���O(sh��)���c(di��n)��ʹ�^��׃��ͻȻƫ�x�O(sh��)���c(di��n)���tPID�������ļ��̷���(y��ng)��Ҫ���������(xi��ng)���a(ch��n)�������@��ʹ��������(du��)ͻȻƫ�x����`��׃������(d��ng)һ�ξo��У����ͬ�r(sh��)�O(sh��)���c(di��n)�c�^��׃��֮�g���`����������(d��ng)�Ԅ�(d��ng)�{(di��o)�����еı��������(xi��ng)��
�������ã��S���`���S�r(sh��)�g�ķe�ۣ��e���(xi��ng)Ҳ�_ʼ��(du��)��������ݔ���a(ch��n)�����á���(sh��)�ϣ��������@�N����(y��ng)�t�g���^�����`�����ӷdz��������ʷe�������(xi��ng)����K��ݔ����̖(h��o)��ռ֧���λ�����ڷe���������۷e���`��������������ʹ���`���������Ԍ���(hu��)�^�m(x��)�a(ch��n)��ݔ�����˕r(sh��)�^��׃���п��ܳ��^�O(sh��)���c(di��n)���a(ch��n)�������`�
��������e�����ò���̫��(qi��ng)�ң��t����a(ch��n)�����`�С��������`������S�����`��e����ؓ(f��)�`���������ӣ��e�����Ì��_ʼ��u׃С�����^�̌��؏�(f��)��(sh��)��ֱ���`��۷e�`��������ͬ�r(sh��)������(j��)��ʎ�`����̖(h��o)���֣���(d��o)��(sh��)�������(xi��ng)���^�m(x��)�������ڿ�����ݔ���еķ��~���������(xi��ng)Ҳ���S�`����̖(h��o)����ʎ�����²���(d��ng)��
�����F(xi��n)�ڼ��O(sh��)�^����һ��(g��)�ɴ��Ͳ�ů�t�����С���g���tԓ�^�̌��A���ڌ�(du��)�������Ŀ����M(j��n)�п���푑�(y��ng)���˕r(sh��)�������`����ڕr(sh��)�g�̣ܶ��ʷe�����Ì������ڿ�����ݔ��������Ҫ���á���һ���棬��(d��ng)�^�̞�߶��`���r(sh��)�������`����ٸ�׃���������Ì��ڿ�����ݔ��������Ҫ���á�
���������@��PID����������ʩ�ӵĿ��������S�����^�̵IJ�ͬ������(y��ng)׃������ˣ��M��PID�������܉���������`����΄�(w��)����ֻ�������cÿһ��(y��ng)��ƥ�����Õr(sh��)�ſ������ø��á� ����PID����������ӛ�������
����1788�꣺James Watt���������C(j��)����w���{(di��o)��������һ�N���б������������ęC(j��)е�����b�á�
����1933�꣺Tayor��˾���F(xi��n)�Ѳ���ABB��˾���Ƴ�56R Fulscope�Ϳ���������һ�N����ȫ���{(di��o)�������������Ě��(d��ng)ʽ�{(di��o)��(ji��)����
����1934-1935�꣺Foxboro ��˾�Ƴ�40�͚��(d��ng)ʽ�{(di��o)��(ji��)������һ�N�����e��ʽ��������
����1940�꣺Tayor��˾�Ƴ�Fulscope 100����һ�N�����b��һ��(g��)��Ԫ�е�ȫPID���������Ě��(d��ng)ʽ��������
����1942�꣺Tayor ��˾�� John G. Ziegler �� Nathaniel B. Nichols ����������Ziegler-Nichols ������(zh��n)�t��
�����ڶ���������(zh��n)���g�����(d��ng)ʽ PID ���������ڷ�(w��n)������ŷ�ϵ�y(t��ng)���Լ����ںϳ����z�������麽��ȼ�ϼ���һ�wԭ�ӏ���ʹ�õ�U-235 �Ȳ��ϵ����a(ch��n)���ơ�
����1951�꣺Swartwout��˾���F(xi��n)�Ѳ���Prime Measurement Products��˾���Ƴ���Autronic�a(ch��n)Ʒϵ�У���һ�N������չܼ��g(sh��)����ӿ�������
����1959�꣺Bailey Meter��˾���F(xi��n)�Ѳ���ABB��˾���Ƴ��ׂ�(g��)ȫ�̑B(t��i)��ӿ�������
����1964�꣺Tayor��˾չʾ��һ��(g��)�λ�·��(sh��)��ʽ����������δ�M(j��n)�д������N�ۡ�
����1969�꣺Honeywell��˾�Ƴ�Vutronik�^�̿������a(ch��n)Ʒϵ�У��@�N�a(ch��n)Ʒ���Џ�ؓ(f��)�^��׃��������ֱ�ӏ��`���ρ�Ӌ(j��)��������á�
����1975�꣺Process Systems��˾���F(xi��n)�Ѳ���MICON Systems��˾���Ƴ�P-200�Ϳ���������һ�N����̎������PID��������
����1976�꣺Rochester Instrument systems��˾���F(xi��n)�Ѳ���AMETEK Power Instruments���Ƴ�Media����������һ�N���b�͔�(sh��)��ʽPI��PID�������a(ch��n)Ʒ��
����1980�������꣺���N�������������g(sh��)�_ʼ�Ĵ�W(xu��)���о��C(j��)��(g��u)���I(y��)�磬�����ڸ������y�Ŀ��ƻ�·��ʹ�á��@���а����˹����ܡ����m��(y��ng)�����Լ�ģ���A(y��)�y(c��)���Ƶȡ�
����Ո(q��ng)��Ҋ�P�����ġ����m��(y��ng)���Ƽ��g(sh��)��һ�ģ��ɏ� www.controleng.com�ϵ� www.controleng.com�ϵ�
����CONTROL ENGINEERING bookstore�еõ���
|

