�����������Wģ�ͺͷ��棬���̎����Ԍ��B�m�Ե��^�̿���ϵ�y�M��ģ�M�yԇ���������yԇ����ϵ�y�Ժ���\����r��
��������ģ�ͺ�����ģ��չ�F���nj�����������������@�Nģ�Ͳ�ͬ���^��ģ�̈́t��ӳ�ܿ�ϵ�y�IJ����^���Լ������ɔ_��푑���r��ͨ�����^��ģ�Ͷ������Ô��W���́��_��ϵ�yݔ������ݔ����֮�g���Pϵ��
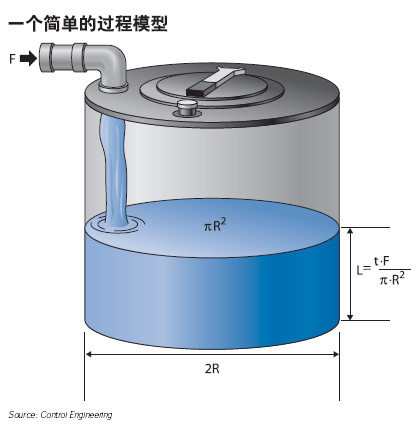
�D1��ͨ�^�@�����ε�ģ�ͣ��������������ˮ��ÿ���F�������������һ���װ돽��R�ĈA���wˮ�䣬t ��犺�ˮ��߶�L����λ���ף� �Ƕ��١�
ģ�Ϳ�����Ч�؎����҂�����PID��·��Ҳ���Ԟ��^�̿���ϵ�y���OӋ�ṩ���ա��e�����Ӂ��f����D1��ʾ���ǽoһ���A����ˮ���ˮ���^�̡����Oˮ�����������F����t��犺�ˮ�����ˮ��߶Ȟ飺
����[1]
�������У�R��ˮ��ײ��A�İ돽���@��һ��ģ�Ϳ����Á����㣬��Ҫ�b�M����ˮ�䣬��������Ҫ�\�ж��L�r�g��
����ģ�͵�Ҫ��
�����^��ģ��Խ���s��������׃����Խ�࣬����֮�g�Ĕ��W�PϵҲ���ӏ��s��������ϵ�y�����s�������B�m�^�̵�ģ�Ͷ����������Ă�����Ҫ�أ�
������ݔ��׃��;
������ݔ��׃��;
�����������
�������㷨
����ݔ�������_�lģ�͕r��ͨ�^ݔ������ֵ�����ó����A��ֵ�������ˮ��������У�ݔ����L�Ϳ�����ݔ����t��F��ֵ���������
��������R��ֵȡ�Q��ˮ��Ĵ�С��һ����r�£������Ƿ�ӳ�����A�ƌW�Ļ���ԭ���ij�����������W�����W�������W���ΌW�ȣ����Q�����^�̵Ļ������ܣ������@Щ�����Ǻ㶨��׃�ģ�������ݔ��ݔ��ֵ�S�r�g��׃����׃����
�����㷨������N���W�\�㷽������Ҫ���Á�����ݔ��ͳ���ֵ����ݔ��ֵ�����ε���˷��ͳ˷����緽��[1]��ʾ�����s����������˹׃�Q�ͽyӋ���䶨�ɡ�
��������ģ��
�����^��ģ�Ϳ��Ԟ��OӋ�����С��������Ɯyԇ�ṩ��Ч�Ď������������������Ҫһ��������͕r�g�����ڃȵ�ģ�ͣ�ͨ�^�O�yϵ�y�ķ�����푑��ٶȣ����Д�ԓ����ϵ�y�Ŀ������ܡ�����ģ�ͅ�����һ���˽���̎����Խo�^�����M������һ��푑��^��Ŀ����������ǽo�^����M������һ���^���Ŀ����������_���A�ڵ�Ч����
����ͬ�ӣ�ģ�M�A�y�����������Ô��Wģ�́�y������ϵ�y�����ܣ����Д��ܿ�׃���Ƿ_���_���˿���Ҫ�����\���^����ͨ�^���^�ó��ķ����������M�������{����
������ʹij���Ʒ����ǻ���ij���⑪�ö��_�l�ģ����M�Ќ��H����֮ǰ��Ҳ���������^��ģ����̓�M�h����ԓ���Ʒ����M�Мyԇ��ģ�͵Ŀ��Ʒ��̿���ֱ�Ӿ��̌��룬Ҳ���ԎN���÷����Z���е�����һ�N�����Զ��x�a���댣�õ��{ԇ�C�С���Ӌ��C���M�з��棬���Ը���İl�Fԓ���Ʒ����еIJ��㣬Ҳ���Ó��ĕ����挍�Ĺ�������κΓpʧ��
����ģ���_�l����
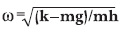
����������;��ʲô������ģ�͵��E�[���ǰ�ϵ�y���\�Р�B��һϵ�еĿ��Ʒ��̱�ʾ�������緽��[1]��ʾ����"���õĆΔ[ģ��"��������D��ʾ���ڵ����Ϲ̶�һ�����ɣ�����픶˹̶�����һ�����ˮƽ�������ʹԓ���w��һ�����η����ȁ��ؔ[�ӡ�
�����@��ģ�͵��\�Р�B���^׃�ο��Ա������ڶ��������о�������������һ����ͯ��ߣ�Ҳ����������ij�ߌӽ��������L�Гu�εĿsӰ������һ�����^��Ҳ���Խ��ƿ����������~�ȴ����ߕr�Ȳ��Ą�����
�����oՓ���ķN��r������ԭ��������ͬ�ġ����Ɍ����w�ď��������w�����������������ġ���������w�͏��ɺ�������������һ���|���x����H�ף��|����mǧ�˵����b�ã������b�õ��\�Ӡ�B�Ϳ����ú��л���q�ķ���ʽ��ʾ����D��ʾ��
�������H���Ùz�y
���������@���b�õĺ����^��һ�ӣ��@��ģ���DZƽ��F����ģ�M���ٶ��������κ�����Ӱ����w���\�ӣ���Ħ�����ȣ������Ɍ����w�ď���Ҳ�c�����˦���ȫ�ɱ���������߀Ҫ�ٶ���ԓ�\���^���Ǐ�һ���^����ֱλ���_ʼ�ģ����ȵij�ʼֵ���㣩��
�������ڮ��ȟo�FС�r��q��sin(��)��ֵ������ȡ���q��Qsin(��)����ʽ[2]���Ժ����ɷ���ʽ[3]������ʽ[3]�����P�ڦȵ�څ�݈D���õ�һ�lб�ʞ�-��k- mg��/mh��ֱ�������ʽ[3]���P�ڦȵľ��Է��̡�
�������ÆΔ[ģ�͡���
[2]

����������ĵ��ÆΔ[ģ�͡���
[3]

����������ģ�ͷ�����⡡��
[4]

��������ʽ��á���
[5]
 ���� ����
[6]

�������ٶ�׃���Ħȡ��ǽ��ٶȦȵĶ��Ό�����t��ԓ���w�ij�ʼλ�õ��F�ڵ��\�ӕr�g����'0�����w�����������µij�ʼ���ٶȣ�A�����w�[�ӵ�������؞���ӵ��l�ʡ�A�ͦ��ǃɂ�ֵȡ�Q��k��m��g��h�ͦ�'�ij��������ʽ[5]�͵�ʽ[6]��ʾ��
��������ʽ[3]�����ărֵ���ڣ�ͨ�^�����Եõ�һ�����P�ڕr�g��څ�݈D������څ�݈D���҂������A�yԓ�^���Ժ���\�Р�B���@��������һ��ֻ�÷���ʽ[3]�@�N���Է��̾Ϳ��Խ�Q�Ć��}�����H�ϣ�������ʽ[3]�M����⣬�҂�Ҳ���Եõ��P�ڦȣ�t���ı��_ʽ���緽��ʽ[4]���@ʾ��
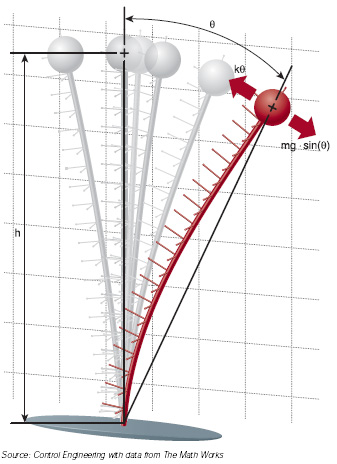
�cλ�á������b����ˮƽ�����������£���һ���^����ֱλ���_ʼ�������\�ӡ�ԓ�b�õ�����mg.sin(��)�͏��ɮa���ď���K�������һ���ƽ�⡣���г���g��k�քe�����������ٶȺ͏��ɏ���ϵ���� �������֮�£��������Һ����ķǾ��Է��̣���[2]�����@�N����]�hϵ�y�ķ��������������sһЩ���ܶ��r���˺������W�\�㣬���̎�����������ĕr�g�;���ȥ����һ������ģ�Ͷ����ǷǾ��Եġ�
����������
�������^��������ķ���ʽ[3]�ھ��_�Ŀ���ݔ��׃����(t)�ϣ��������e����Ч�����͌��H�����^�̲�ͬ������������ݔ��׃������һ���ɸ�׃�����������H�^���У������ˆT���ܕ��x�����w�µ�λ�ƻ��µ��ٶȡ�
������ʹ���@���^���Լ�ģ�ͼ�����һ���ľ����ԡ���飬ֻ���ڮa���Ĕ[�ӷ���С������ʹ�Ƚ��Ƶغ�sin(��)��ȕr�������ó��ķ���ʽ[3]����Ч����t��ϵ�y�ĵ��挍�\�Р�B��ԓ���շ���ʽ[2]�M��Ӌ�㡣
�������H�\���У��\�Р�Bͨ������ݔ���ݔ���ĸ�׃��׃�������磬��׃���ĘO��ֵ���ߵ��O��ֵ���ُĘO��ֵ����������^���У�������\�Р�B����˶���׃����ˮ������@������У���Һλ��䵽���w����ƽ��λ�ã��@��ģ��Ҳ��ʧЧ����
�ԣ��^��ģ���б�횿��]���@Щ���ܳ��F��׃�ӣ���t�������@Щδ�����Ƶ�ģ���M�в������������_���A�ڵĿ���Ч����
�������⣬�ڵ��ÆΔ[ģ���У������ʼ�l���]�б��ʴ_��ӛ���������[3]Ҳ�����ܜʴ_����ԓ�b�õČ��H�\�Ӡ�B�����@��ģ���Ψһ�ij�ʼ�l�����Ǧ�'0������ӳ�����w���ڳ�ʼ�r�gt=0�r���ܵ��������îa���ij�ʼ���ٶȡ�ʽ[6]���Կ�����'��ֵ�����w�[�ӵ������Ӱ푡��ܵ��������a���ij�ʼ���ٶȦ�'0Խ�t���wÿһ�Δ[�ӵ����A�͕�Խ��
�����M����ˣ������'�Ĝy��ֵ���`���ô����ԓģ����Ӌ��������Ҳ�������w�Č��H��r���Fƫ�ͬ�ӣ�������w���LJ���ďĽ^����ֱλ�ã�����(0)=0��λ�ã����l����ģ�͵��О��A�yҲ�����Fƫ��ڑ����^���У��������H�\�Р�B��ͨ�^ģ�͜yԇ������Ġ�B��ȫ���ϣ����ƹ��̎�ͨ����ϵ�y�����г�ʼ�l���O�Þ��㣬�Ա������ʼ�l����ƫ�����ɽYՓ������`�
��������Y��
�������^�����@Щ���Ɨl�����Ա��_�J�����������OС�ĕr�Ϳ����x���^��ģ�͌����H��r�M���ஔ�ʴ_�ķ��档����֪�^�̵��\�Р�r��ǰ���£����̎�����ģ�ͷ��뵽���N���ܳ��F�ĭh���У��M���д����Ե�һϵ�Мyԇ���Ա��Cϵ�y���ȡ�
�������磬���LͻȻ׃��B�����u�εĸ��Ӆ����������õĆΔ[ģ�ͼ����ģ����ӳ�ʼ�_�ӣ��ȡ�0���������ӳ�ʼ�Ľ��ٶȣ�Ҳ����ģ�M��һ����ƵĜyԇ�h����ʽ[6]���Կ��������A�ͳ�ʼ�ٶȦȡ�0�����ȣ�����ʼ�ٶ����ӣ����Ҳ�����������ӣ����猍�H��r�д�B����rһ�ӡ�
�����������ă��c���ڣ������ڌ��H�����ě]�Lԇ�^�ĭh�����M�Мyԇ���e�ǣ��ڷ����^���У����ܰl�FһЩ�]���]�������r���������ڌ��H�����б�횱����Σ�U��r��Ҳ�����Ǯ�ǰϵ�y߀��Ҫ���M��©����������һ����Ч��ģ���M�з���r�����̎��Ϳ��ԏķ��͵�ԇ���`���{ԇ�У����Ʋ�����ϵ�y�\�б�횵ĸ��N�l������ضȡ����������ٵȣ������Ľ������a�ɱ��� |

