����ǰ��
��������������ڂ������ęC�����о��ɞ��_�l���ܙC���˵�һ����Ҫ���棬���O��ظ����˙C���˵����I�����������ش�đ��Ãrֵ�Ͱlչǰ�������������ںϼ��g���nj�ͬһ�z�y�������ø��N�������z�y����Ϣ�Ͳ�ͬ��̎�������ԫ@��ԓ�����ȫ��z�y��Ϣ���Ķ���ߙz�y���ȺͿɿ��ԡ��ڶ�������ϵ�y�У���Ϣ���F������ԡ����s���Լ�����������Ϣ̎����ͬ�چ�һ�Ă��Йz�y̎�����g������������Ϣ�ںϼ��g�ѳɞ鮔ǰ��һ����Ҫ�о��I��Ŀǰ��Ϣ�ںϷ������ö�����ϢԴ���@ȡ���P�ڌ���ͭh������Ϣ�@�ø����΄�����Ҫ��ȫ�桢��������Ϣ����Ҫ�w�F���ں��㷨��[1][2][3]����ˣ���Դ��Ϣ�ںϵĺ��Ć��}���x����m����Ϣ�ں��㷨����Ϣ�ںϵķ�����Ҫ�������ֱ�ӌ�����Դ��������ә�ƽ������Ԫ�W�j�ȣ����Ì���ĽyӋ���Ժ���ģ���M�в������翨�����V����ؐ�~˹��Ӌ����ؐ�~˹��Ӌ���yӋ�Q����Փ�ȣ�����Ҏ�t�����ķ�������ģ���������C���������a��ʽҎ�t�ȡ����л����W�j�Ķ�N��������Ϣ�ں��ǽ�������lչ�ğ��c. �W�jʹ�ô������ε�̎���Ԫ������Ԫ��̎����Ϣ����Ԫ���ӴνY������ʽ�M����ÿ���ϵ���Ԫ�Լә�ķ�ʽ�c������
�ϵ���Ԫ�ӣ����ò��нY���Ͳ���̎��C������W�j���к������e���Լ��ԌW�����ԽM�������m���������܉�ģ�M���s�ķǾ���ӳ�䡣�W�j���@Щ���Ժ͏���ķǾ���̎��������ǡ�ÝM���˶���������Ϣ�ںϼ��g̎����Ҫ���������W�j����̖̎�����Ԅ��������܌��F����������Ϣ�ںϼ��g��
���������W�j���ɵĂ�������Ϣ�ں��㷨
�������_�ϵK�����ƄәC���ˌ�������Ҫ��һ���֡��ƄәC�����еĶ�N��������Ϣ�ں�ͨ�����Է֞����ͼ��ںϺ��ںϡ��ͼ��ں�ָ���nj�����������ֱ���M�м��ɣ����|�Ͼ����M�Ѕ����͠�B��Ӌ��Ȼ���@Щ��Ӌ��������·��Ҏ���͈��ЙC�����Ԯa���C��������������Ϳ�����̖�����ں�ָ������һ���Ӵλ��ĽY���У�����ͬģ�K�ṩ�Ŀ�����̖�M�з���ɣ��Ķ��������������M���g���ںϡ����ڸ��ںϣ��īI[i]������˻����О�ĽY�����īI[5]�����һ�N�����W�j�Ľyһ��ܡ����������һ�N�����W�j���ɵĂ�������Ϣ�ں��㷨������HEBUT-I�͙C�����ό��W�j�������ڌ��ϵK����R�e�ϣ������ϵ�y���R�e���ȣ�ȡ���˺ܺõ�Ч����
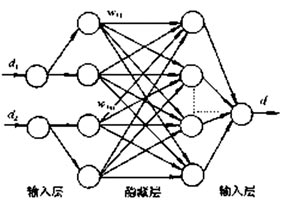
�D1����BP �W�j�Y�� �����W�j�ļ���
����1996�꣬Sollich��Krogh [6] ���W�j���ɶ��x�飺���W�j�����������ނ��W�j��ͬһ�����}�M�ЌW����������ijݔ��ʾ���µ�ݔ���ɘ��ɼ��ɵĸ��W�j��ԓʾ���µ�ݔ����ͬ�Q������1996�꣬Gutta��Wechsler [7] ���W�j���ɺ��ж�����Y���M��������Ę�R�e���W�j�ļ�����BP�W�j������������ͶƱ�����ɣ����Y��������ʹ���W�j���ɲ��H������ϵ�y�Ľ����ԣ�߀������R�e�ʡ�
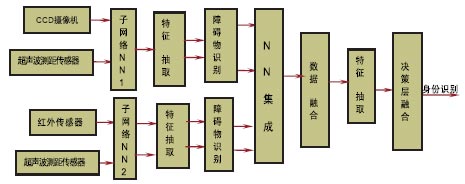
�D2����N������Ŀ���R�e���ںϽY��

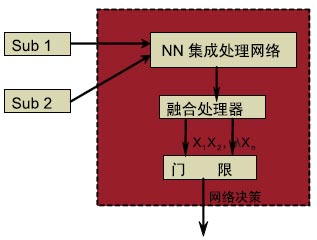
�D 3��HEBUT-II �͙C����
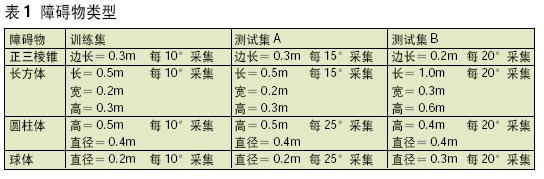
�D4���ںϾW�j�Q�ߌ�
�������ɵĽY���в�ʽ����ʽ��ָ�����R�e��ϵ�y�������ؽ���ԭʼ�D�o���Լ����R�e�Y������������������R�e�Y�����A�ϵõ���K�Ĵ𰸣����м��ɵķ�����Ҫ��ͶƱ�ķ�����ؐ�~˹�������W�j�ϳɷ������ڲ���ʽ�r��������Ǫ����OӋ�ģ��M�ϵ�Ŀ�ľ��nj�������һ������ĽY�����m���ķ�ʽ�C�������ɞ���K�R�e�Y�����Բ���ʽ�M�ϕr����������ṩ����Ϣ�����Ƿ��e��Ҳ���������Pe�Ķ�����Ϣ������x����ʵȣ���
�����ڌ��H�����У����ڸ����������W�j�����ܱ��C�e�`�����P����ˣ��W�j���ɵ�Ч���c����ֵ�����һ���IJ�࣬������߷����������������ஔ���@��
������BP�W�j��Back propagation fuzzy neural network���Ľ���
�����ڶ�������ϵ�y�У����������ṩ�ĭh����Ϣ������һ���̶ȵIJ��_���ԣ����@Щ���_����Ϣ���ں��^�̌��|����һ�����_���������^�̡�����ģ��߉���g���W�j���g���Ԫ��������c����ģ�����g���W�j�ЙC�Y�ϽM��ģ���W�j����ϵ�y���Ɍ��Fģ��Ҏ�t�Ԅ���ȡ��ģ���`�ٺ������Ԅ����ɼ��ھ��{������˱����چ�BP�W�j�Ę����ϲ�����һ�Nģ���W�j��Back propagation fuzzy neural network������Ϣ�ںϵĘ���������������ه��ϵ�y�ľ��_���Wģ�����m���ڏ��s��ϵ�y���^�̡���BP�W�j�ČW���C���ϲ���ģ���W���ķ������@�N�W�����������c�njW���^����ģ�������`�ٶȣ��M�Мy�ȣ���ݔ�����ǽ��^ģ�������ģ���������ڃ�ݔ���ݔ����ģ���W�j��Ӗ�����飨d1,T1����d1=��d11��d12����T1������ݔ������ȫ��ģ���������������`�ٺ��������������`�ٺ�����ͬ������d1j �� [1,0]����ֵ��[1,0]�����õ��`����̖�飺
 ��9�� ��9��
�����W����Ŀ����ʹE ��С��������ģ��ϵ�y�������ԣ���ʹ����Yi=Ti��Ҳ�������㣬��ˣ�������ͬ��Ҫ����Ҫ��ͬ��ֹͣ����Ҏ�t�����ڶ�ݔ���ݔ����MIMO����ģ��Ҏ�t���Էֽ�����ɂ���ݔ���ݔ����MISO����ģ��Ҏ�t��
��������BP�W�j�ļ���
������D2��ʾ����̖̎���W�j�øɌ����������z�y������̖�M��̎������ȡ������Ϣ�������ں��W�j��ݔ�룬�ں��W�j���õ�����Ϣ��һ���ČӴ����M���ں�̎�����Եõ���ȫ�桢���ʴ_����Ϣ��Ҳ�������f���քe��R�e���N�ϵK����ӾW�j���Բ��м��ɵķ�ʽ�Ѹ������w�W�j�M�����������ԫ@��һ�������ܵ��R�eϵ�y��ÿһ����ԪBP�W�j���Ժܺõ������D���A̎�������S��������ȡ������ÿһ����������Ŀ������X��ÿһ���������Ԍ���BP�W�j��ÿһ��ݔ�룬���^Ӗ�����Ĕ����W�����Üyԇ��A��B�yԇ�����Y�����鼯�ɾW�j��ݔ�룬����Boosting�������ɼ��ɾW�j���w��
�����ƄәC���˶���������Ϣ�ںϼ����ϵK����R�e
�����ӾW�j���ϵK����R�e�^��
������D3 ��ʾ����HEBUT-II�͙C���ˣ��D3��ʾ����������������M��CCD�z��C���t�����
���������y��������������ҕ�X�o����ṩ��70%���ϵ�������Ϣ�������������������ṩ�˱�Ҫ����һ�ӣ�ҕ�Xϵ�y���ƄәC�����ṩ�˴�������Ϣ���o�ƄәC�������ҕ�X�b�ã�CCD�z��C�Y����������ʹ�ƄәC���������ߕr�܉��R�e��ǰ�����ϵK��@���ƄәC���ˌ��F���ܻ���������Ҫ���x������ʹ�ƄәC������һ�����_����������ȫİ���ĭh�����F����ʽ�������P�I����ҕ�Xϵ�y���_�c��������������r�������Ӳ�������F�ȃ��c�����V�������y�������������F��λ���h����ģ�������y�������o��ҕ�Xϵ�y�c����ҕ�X���ʹ�ã��Ɍ��F����ҕ�X���ܡ�
�����D����Π�݆���ж�N��ʾ����,Dubois[8]�����������ʹ��һ�������Ğ���c,�����D�Ƕ��g���ɘӵ�ʸ�����н��������D�ε�߅��,ԓʸ����ģ�����ĵ���߅���c��ֱ�����x�Q��,��ԓ�����H�����ԈD�Ρ�Gupta[9]������Ƶď���ͶӰ����������Ӹ�֪����ݔ��������,���ȷֽǶ��g���Ğ���߅������ظ�ۙ�ķ���,�^Dubois���龫�_�����IJ��������Ğ���c,��߅������ظ�ۙ�ķ���,�����ĵ���߅���c��ֱ�����x����߅�ľ�����,���wһ���������ݔ��Ŀ��ģʽ�ķ��������߅�ľ����о���һЩ����Ҫ�����|��������, ƽ�Ʋ�׃��, ���D��׃��, �����ԡ�߅�ľ����е���������ʹ������ڈD���R�e�������w���Π�ͨ�^��߅�ľ��ʾ�r��һ�����S�D��ͱ�ʾ����һ��һ�S���������Ρ��҂��������@�������팦����Ы@�õ�߅�ľ������c�������������^���R�eƽ��D��
���������y������������Ч�y������б��y���Ԓ���t�ں�һ·�������l��֮ǰ�������յ�ǰһ·�l�صķ��䲨����t�J��ǰһ·�o���y���˰���Ч�y������Թ������̵��}�_�g���l�͕r�g�����˜p�ٳ�������Ӱ푣�����ѭ�h�ɼ��ķ�����һ��ֻ��һ�������������ɼ�����������ϵ�y�����г�3��3��У��@�ӣ������������D���3��3���^��õ���������3��3�����xֵ�����ǣ����w�ĈD�����ֻ��ռ�������D���һ���֣�����ֻ��Ҫ����9�����xֵ������������ȡ��8�������c��8�����xֵ�Լ����ĵľ��xֵ�����ĵĹ����ǻ��������c�������c�������ڵą^����Pϵ����ȡ��һ�N���η����������c�ľ��x����������څ^��ľ��xֵ��ͨ�^�����D�Q�@�����ڔz��C����ϵ�y�е�9���c�ľ��xֵ��
�����t�����������һ�N��Ҫ�ı��ӂ�����,�������S�ચ�صă��c,��Ŀ�˙z�y��ۙ�о�����Ҫ������[10]���t��������������ݗ���κ�����,ֻ��ͨ�^����Ŀ��ݗ��ğ��܌�Ŀ���M��̽�y��ۙ��,������ױ��ɲ��λ,�����^���Ŀ��ɔ_����;ͬ�r����Ŀ�˲��ɱ����Ҫݗ�����,�Ķ��֞�ʹ�üt���������Ŀ��̽�y��ۙ�����˗l�������ӾW�j�в����īI[11]����������|�ļ��|��ƫ�Ɯy���ļt��Ŀ�˸�ۙ�������@�N�����������ܾ��_��ۙĿ�˵ă��c��,߀���Мy��ģ���Ǿ��Ե����c,�īI[12]�ڏ��ȷֲ�δ֪��r��,�����īI[13,14,15]�ķ�����Ӌ���ȅ���,�������|�ļ��|��λ�ƌ��t��Ŀ���M�о��_��ۙ��
�D5���N�ϵK����R�e�ʱ��^ �����ںϾW�j�Q��
������D4��ʾ���ӾW�j1��2��ͬһĿ�����˸��Ե��R�e�Y�������ü��ɾW�j�c�ںϛQ�߾W�j���ϵK���M���Єe���W�j��������һ�N���d����Ӌ�㷽��,���бȆ�һ�W�jϵ�y�����ķ������������H�Ͼ��������W�j���ɏ��ķ���������ԭʼ�������M�������ƽ��ȥ������õļӹ�,ʹ�����������������A�y����Ϣ�����^�����c�ںϵĶ�������ϵ�y�����Ƶء����_�ط�ӳ�h��������������Ϣ�IJ��_���ԣ���߂������Ŀɿ��ԡ�
����ͨ�^�ӾW�j1��2��ͬһĿ�˵��R�e�����ÈD4�ںϛQ�߾W�j�M�м��ɡ��Q�ߣ��@�ӿ��Եõ�һϵ�е�ֵ�����1��ʾ��
�������Y������
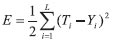
�������挍�����VC++6.0����,BP�W��ݔ�빝�c17����ݔ�����c��4�����[���ӹ��c��16����Ҫ�R�e���ϵK�������w���L���w���������F���A���w�����ƄәC�����Ƅӕr�������l����ÿ��һ���̶��ĕr�g�ξͰl��һ�γ��������ƄәC�����M�е��m����λ�Õr���ɘӾ��_ʼ�ˡ���ȡ���^���У�С܇�@���ϵK���D��ÿ��10��ȡ��һ�Ρ��W�j���@ЩӖ���������M���x��Ӗ�����ڜyԇ�У��OӋ�ɽM�yԇ��������Cϵ�y����Ч�ԡ��������õ����@Щ���������1��ʾ���ƄәC������0.45m/s���ٶ�ǰ�M���R�e�ʣ�Identify Ratio�����QIR�����ڈD�С����ɵ�BP�W���R�e�ʷքe�飺91.82%��92.08%��92.37%��93.91%��92.94%��93.35%��93.98%��94.5% (�D5���Ԍ�о�Ŀ�D��ʾ) �������Δ����ӕr���R�e��߀����ߡ������҂��ķ������ѿɿ������������nj��ö���Ч�ģ��ƄәC���˿��Ԍ��r���R�e���ϵK����͡�
�������īI[16]�������ˆ�����BP�W�j���ϵK���M���R�e��ͬ��Ҫ�R�e���ϵK�����������F���L���w���A���w�����w����������ͬ��Ӗ�����Ϝyԇ��
��Փ���Ќ��Y����BP�W���R�e�ʷքe�飺85%��80%��85%��100%��84%��80%��87%��100%��(�D5����̓о�Ŀ�D��ʾ) ��
�����mȻ���īI[16]�Ќ����e���w���������w�����R�e���_����100%���@���dž��W�j���������w�R�e�ă������ڡ���һЩ���s��Ŀ�ˣ��e���ڌ��H�ď��s�h���У����ɵ�BP�W�j���w�F���^�����R�e�������^�ߵĜʴ_�ԡ����@Щ�������Կ������ɵ�BP�W�jҪ�Ȇ�����BP�W�j�R�e�ľ��ȸߺܶ࣬�R�e�ľ��_��Ҳ���ƌW��
�����YՓ
������֮�����ñ�������Ķ�N������Ŀ���R�e���ںϽY���������˃ɂ�����BP̎���W�j����̎��CCD�z��C�ͳ����y������������̖���t��������ͳ����y������������̖���Č��Y�������ͱ��^�����C�������W�j���ɵĶ��������ں���̖�R�eҪ�Ȇ��W�j�и��ߵĽ����ԣ��R�e����Ҳ���ߣ��@�ӽo�C���ˌ�İ���h���ı��R�͛Q���ṩ�˸������ĿƌW������
|

