TEC �ؿ�PID�����{��
��������˼�Ƽ����̎��ĹPӛ��
��̖��TEC-10A
TEC�ؿؿ��Ԍ��FС�w�e�����ܿ��Ɯضȣ���ǰ�����O�ú�PID�������ڌ��FPID�����{ԇ֮ǰ���_��TEC���ɶˌ������ã���˵ĜضȂ��������M������TEC����ˡ�
�ضȿ����������ı����{������ͬ�S���Dz���ͬ�ģ����{ԇ���E�_�ǎ���ͬ���@����TEC-10A��̖�Ĝضȿ������錍�����f�����ڲ�ͬ�O���ض��£��ڲ�ͬ�h���ض��£�����ϵ�y�PID�������Dz���ͬ�ģ������҂��Խӽ��挍�ĭh����ȥ�{ԇPID���������ґ�ԓ���Jһ�c���]����ã�ֻ���ձ��m�õ�PID�������҂���Ŀ�����្��һ�MPID������������ȵ��ڭh���ض�׃�����O���ض�׃�����ձ��m�á����F���E���������្���R�������£�
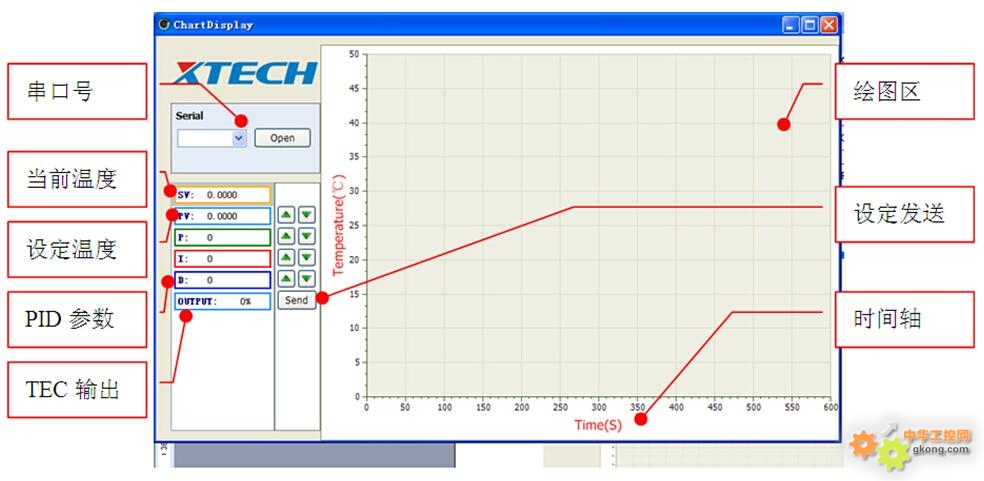
��һ���� �O��TEC��������Ŀ�˜ضȣ�������ƌ�����һ���ضȷ�������ô�x����õ��Ĝض�ֵ������ڲ�ͬ��Ŀ�˜ض��£�PID���������������ͬ���ٌ�P,I,D�����O���㣬�˕rTEC-10Aݔ�����㣬��������Ҳ���ӟᡣ
�ڶ����� ����P��0�_ʼ����5���λ���M��ÿ�����ӣ��ȴ�30������犣��^�쮔ǰ�ضȺ�Ŀ�˜ضȵIJ��ֱ���õ�һ��Pֵ����ʹ��ǰ�ضȱM���ܵĽӽ�Ŀ�˜ضȲ��Ҳ��a����ʎ����0.5~2�ȵģ��ضȲ��ѡ�
�������� �O���e�օ���I����I��0�_ʼ��1�鲽�M��λ���e�ֵ�����������`�I̫�لt�`�����������ضȷ����r�g���L��I̫�t���a���ض���ʎ���ضȲ���������
���IJ��� D�{����һ�㲻ʹ���օ���D��D�ǿ���푑��Ĝضȿ��ƣ��@��D�O��O,����ض�׃�����^�l�������m���O�üӴ�D��ֵ���Եõ��ضȵĜؿء�
�����IJ��E���ք��{��PID�������E��
PID�����{����Ҫ���̎��߂���Ʒ���Ļ��A֪�R��ͬ�r�߂�����������������ĵ����c���S�����g���M����TEC-10A�����˹��{��PID�������⣬߀��������X�{ԇPID�������ܡ���X�߂��L�Ɯض������Ĺ��ܣ��܉��O��Ŀ�˜ضȣ��܉�TEC�M���ʼӟᣬ�M�������䣻ӛ䛜ض��^�_��ֵ�͕r�g���Լ��ׂ����ڵ������{���������ض����������õ��^�_�͕r�g���������뵽PID�����Ľ��Ӌ�㹫ʽ�У��p��ȡ��P I D����ֵ��
�C�ϣ�TEC�ضȿ��ƫ@��PID�����ăɷN��ʽ��һ�N���ք��{�� �����c�ǫ@��·���������F��ȱ�c���{ԇ������Ҫ�^�L�r�g���Ͳ����ˆT���P���ڶ��N�������ض����� �����TEC������ӟ�o�p�Y�ϣ��õ�PID���������c�ǿ��١��ʴ_���o�˞�����Ӱ푣�ȱ�c�Dz����քӣ���Ҫ�B����Xʹ�á�