|
���죬���\��С���ֽo��ҷ���һ��MotionRT7�İ��b��ʹ�ã��Լ�ʹ��C#������λ�Cǰ��Ҫ����һЩ�ʂ乤����
01 MotionRT7����
MotionRT7�����������\�Ӽ��g�Ƴ��Ŀ�ƽ�_�\�ӿ��ƌ��r�Ⱥˣ�Ҳ�LJ�������ȫ�������У������ɿص�Windows�\�ӿ��ƌ��rܛ�ˡ�

1.MotionRT7�߂��������c
��1������ܛ�����b���m�ϸ��NWindows��X�� �Gɫ�ⰲ�b�������w ����Ӳ���������\���S���C�ڙࣨδ�ڙ�Ҳ��ԇ�ã��� ���Է�������á����ӡ��B�ӡ�ģ�M�\�еȡ�
��2���cMotionRT�����汾���ܼ��ݣ�һ���_�l���ɿ����ГQ��Ƕ��ʽ��Linux���Nƽ�_��
��3���yһ������ӿڣ����ٵı���LOCAL�ӿڣ��\�Ӻ����{�ÿ���us���e������ͨPCI���씵ʮ����
��4�����əC��ҕ�X�����ٴ����\�ӿ���+�C��ҕ�X�Č��r���á�
��5���������ܣ����240 �S�ӣ�֧�ֿ翨�ӣ��}�_�c�����ӣ����R�cƽ�_�ӣ��p�Ɍ��Fλ���i�� / PSO �ȸ����ܡ�
2.���m�������\�ӿ��ƌ��r�Ⱥ�MotionRT
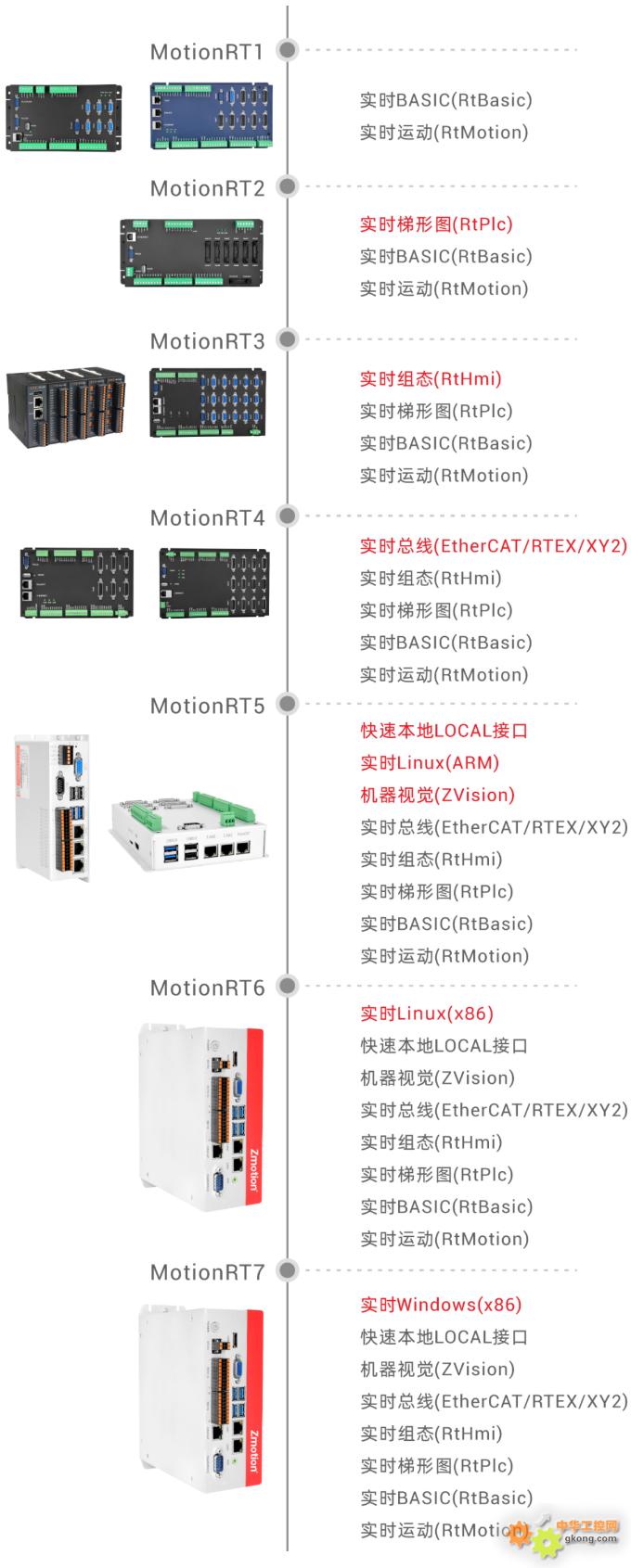
MotionRT�����\�Ӽ��g���m���O�c�lչ���\�ӿ��ƌ��r�Ⱥˣ��Ѳ�������� 7������ MotionRT1�� MotionRT7��
3.MotionRT7����ģ�K��ܛ���ܘ�
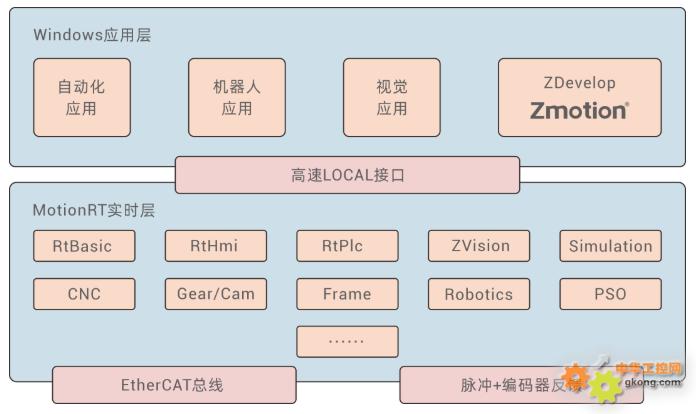
�\�ӿ��Ƴ���ҕ�X�㷨��MotionRT7�\�ӿ������棬ͨ�^�߹���ȴ��M�Д�����������������\�ӿ����c�C��ҕ�X�Ľ���Ч�ʡ�
�Ñ��Զ��x���ܣ��ں�Gmc��Gear/Cam��Frame��Robotics��CNC ���㷨������ �Ñ��Č��ÿ���ϵ�y��
4.�yһ�_�ŵ�API����
�yһ���Ƶ�SDK�� �����еĵ������_�l�h��ͬһ��API�ӿڣ���ƽ�_�ĮaƷ�ܘ������Ч�ʣ����ּ����ԡ�

5.�������õ��\�ӿ��ƹ�������
a.�cλ�\�ӡ�ֱ�����a���A�����a���������a���B�m܉�E�ӹ���
b.���݆������X݆��ͬ�����S��λ���i�桢̓�M�S�B�ӣ�
c.S�����Ӝp�٣�SS�����Ӝp�٣�܉�E�\�Ӹ���ͣ�
d.1D/2D/3D����λ��ͬ��ݔ��PS0����֝M��ҕ�X�w�ġ������c�z������ӹ���
e.�͑����Զ��x�\�ӿ����㷨���ߙC�����������㷨��
f. �����c������ҕ�X��ϡ�
6.�_�ŵ�EtherCAT�c�����{ԇ����
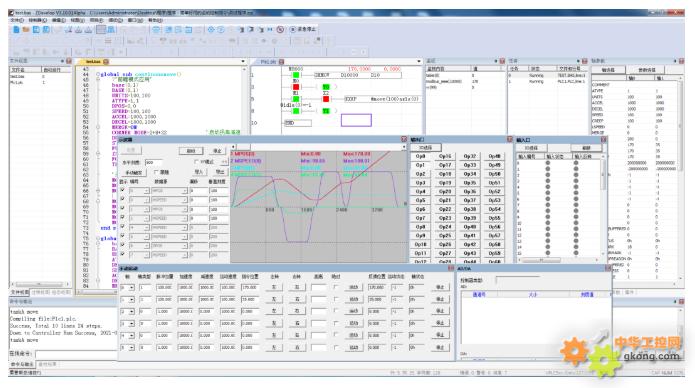
ZDevelop�߂��_�����õ����ã��_�l���{ԇ���\��ȹ��ߡ�����ZDevelop�ǂ��Gɫ���M��ܛ�����߂��S�{ԇ���S��B��ʾ�����ȹ��ߡ�
MotionRT7�V��֧��EtherCAT������MotionRT7֧�������ϏV�����õ�EtherCAT�ŷ���EtherCAT���M��EtherCAT IO��EtherCAT�y�u��EtherCAT��������
���m�����m����EtherCAT�����ù��ߣ����mŬ��������õ��\�ӿ��ơ�
02 MotionRT7�İ��b��ʹ��
��һ�������b�ӳ���
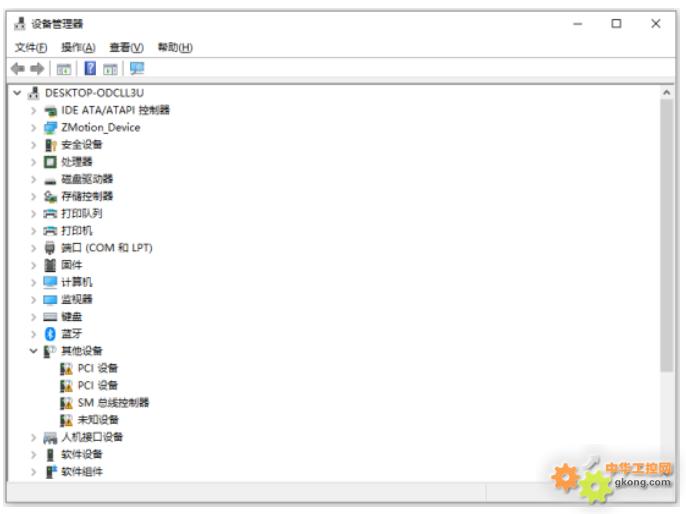
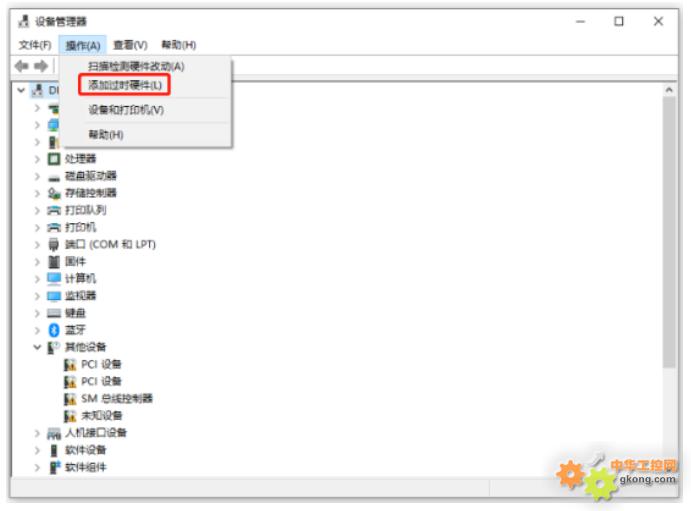
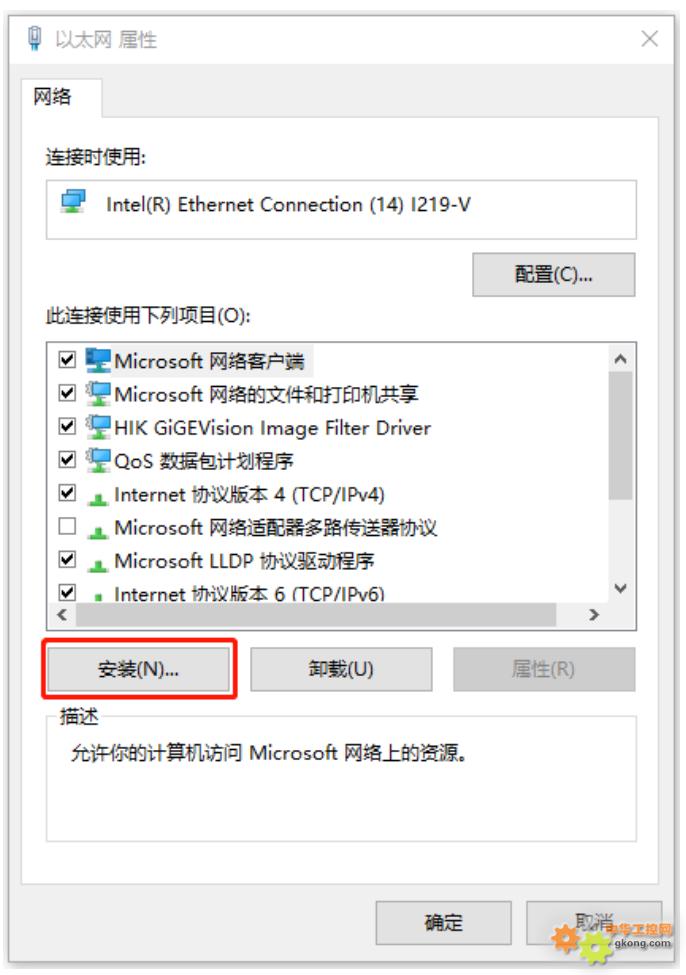
1.���_“�O�������”���x��“����”�е�“�����^�rӲ��”�������x��“�ք��x��”��
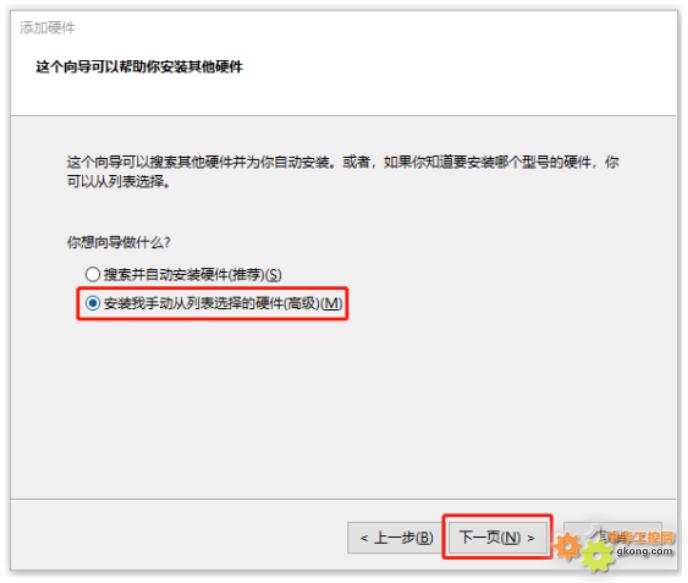
2.�c��“��һ�”��
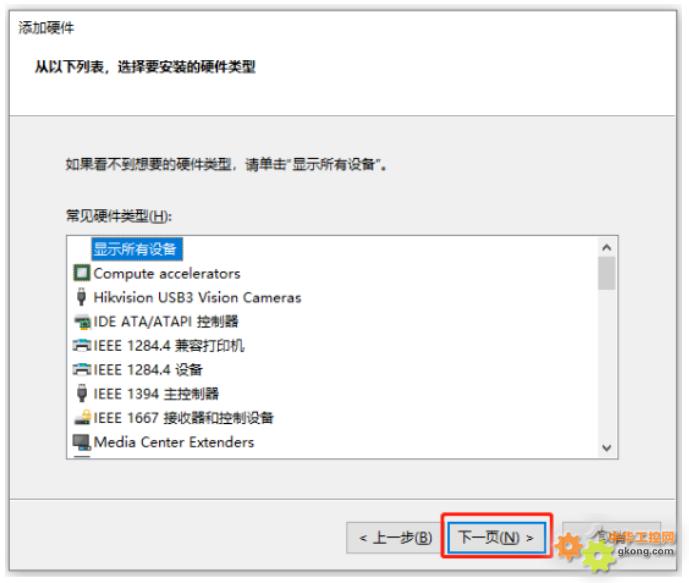
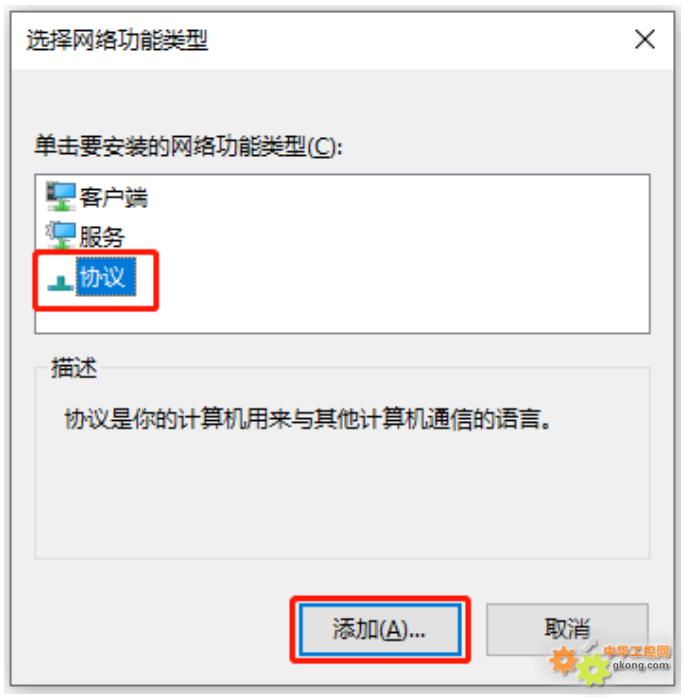
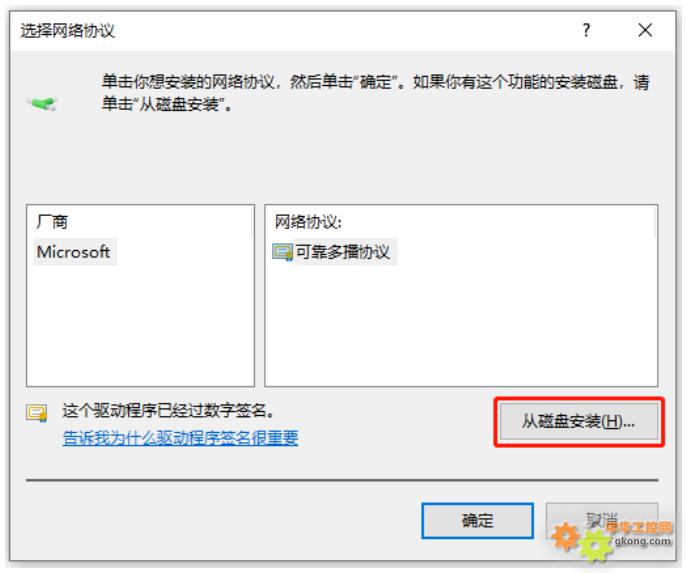
3.�c��“�ĴűP���b”��
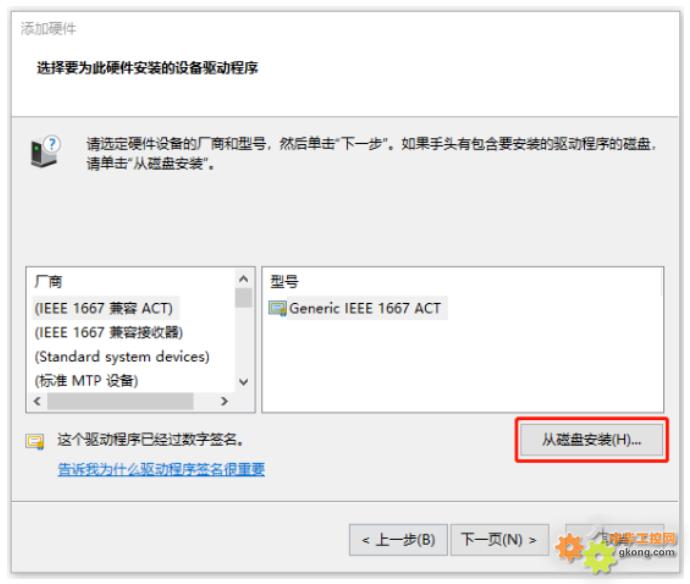
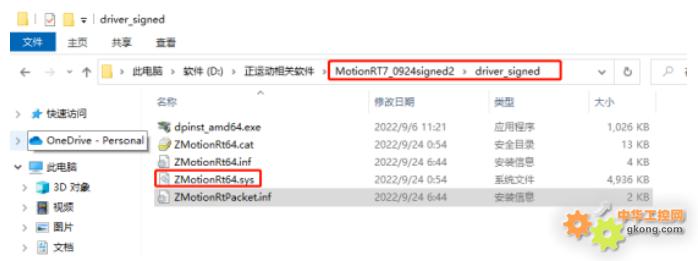
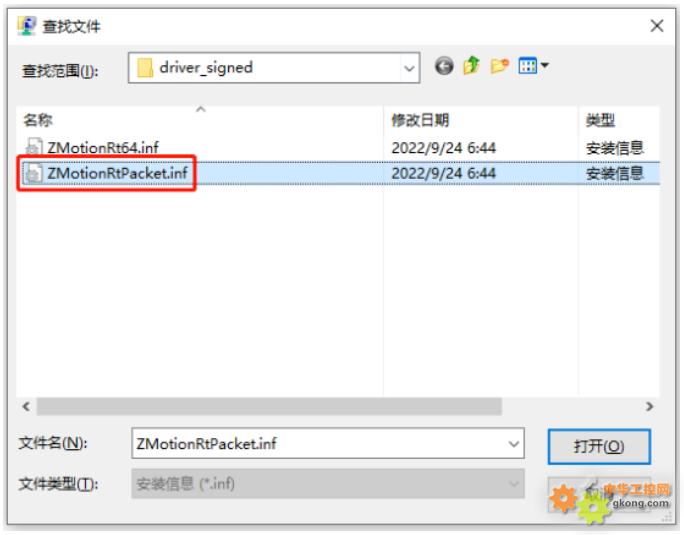
4.�x���������ڵ�·�������_�ļ��A“driver_signed”���x��“MotionRt64.sys”��

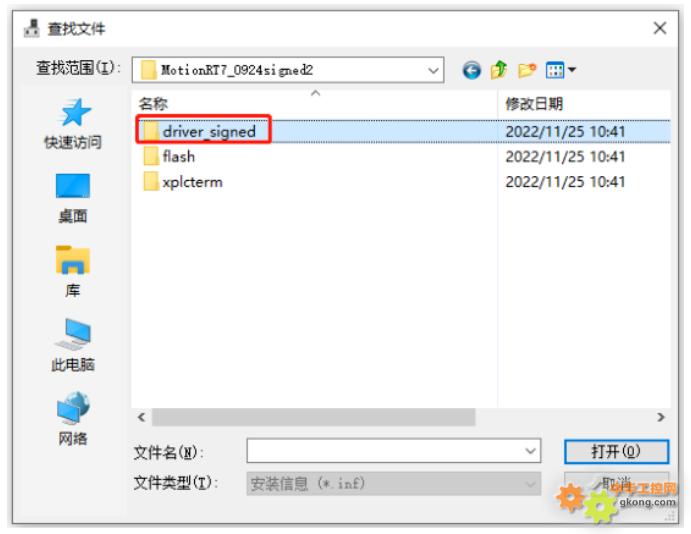
5.Ȼ��һֱ�c����һ����ֱ�����b��ɡ�
ע�⣺�Ӹ��r��Ҫ���O��������h���O�䣬һ��Ҫ�x������ļ�Ҳ�h����
6.MotionRT7�Ӱ��bҕ�l��ʾ��
�ڶ������\�п����_����
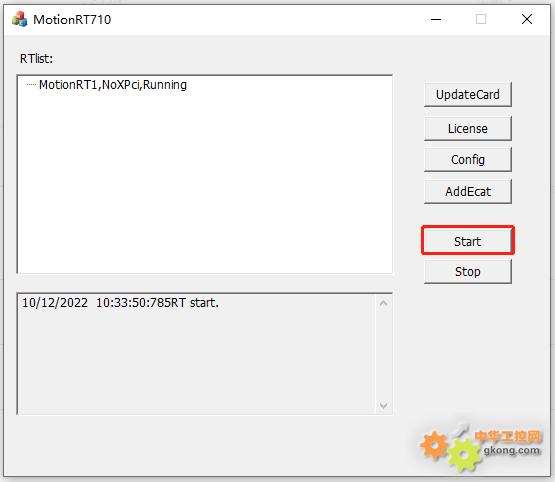
1.���_�����_��������λ�ã��\�пɈ����ļ�“MotionRt710.exe”��
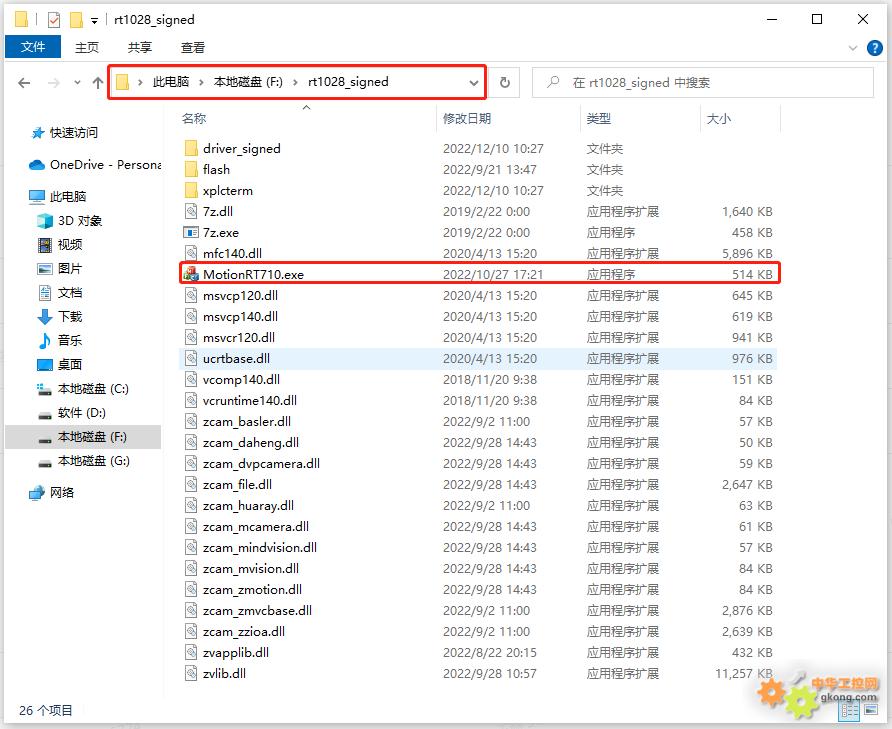
2.�c��“Start”��
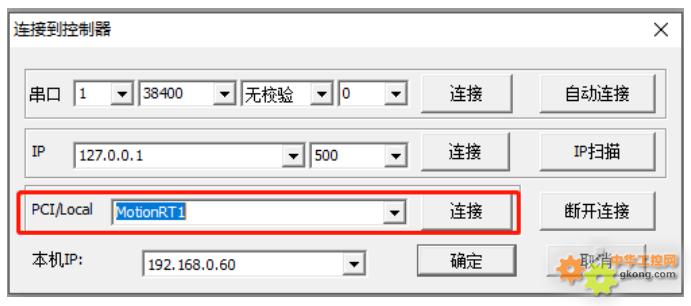
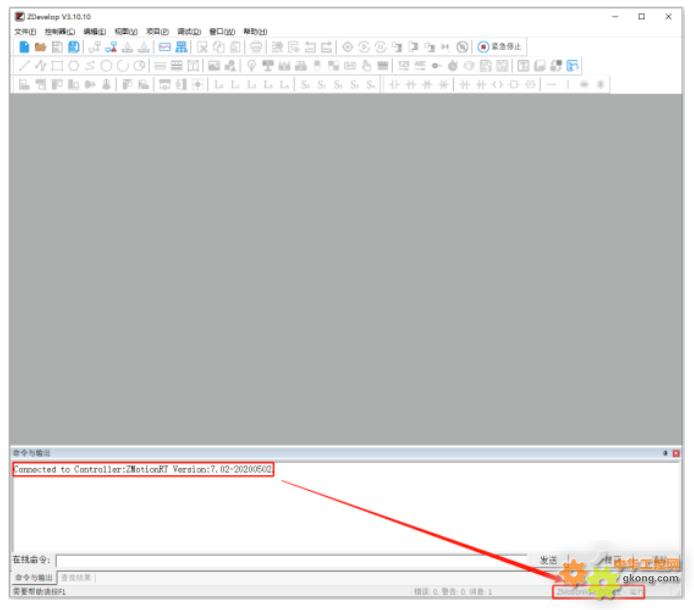
��������ʹ��ZDevelopܛ��朽ӵ����������M�Ѕ����O��
ZDevelop朽ӿ�������ܛ���汾3.10���ϣ�ʹ��PCI/LOCAL��ʽ�M���B�ӡ�
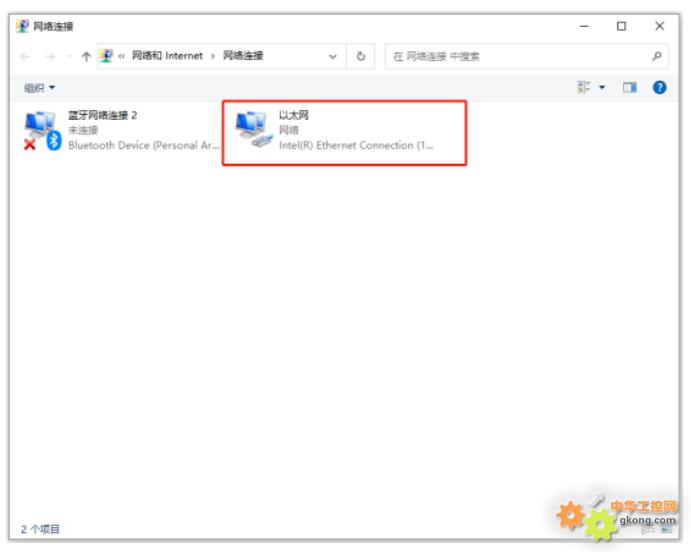
���IJ����W�ڔUչEtherCAT��վ�f�h
1.�鿴�W�j�B�ӡ�
2.�x������EtherCAT�ľW�������I���ԣ����b�f�h��
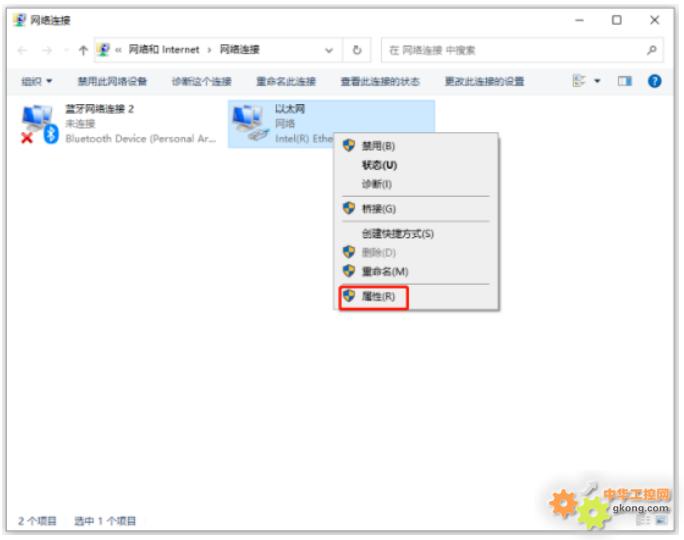
3.�c��ĴűP���b���x���������ڵ�·�������_�ļ��A”driver_signed”���x��“MotionRtPacket.inf”��

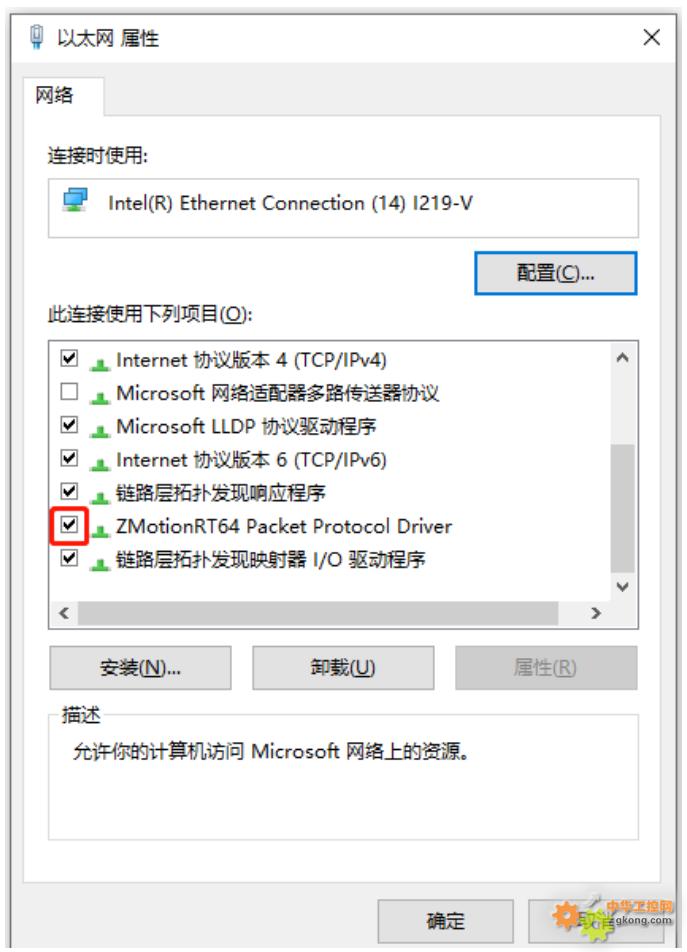
4.���b�ɹ��_�JMotionRT64 Packet Protocol Driverǰ�����x�ϡ�
��RT�����_�����x������AddEcat���@�r�ܿ��������W�����x���ϣ�Ȼ��RT��

5. MotionRT7 EtherCAT�f�h���bҕ�l��ʾ��
�Ԏ�PC�ľW��EtherCAT��һ���Č��r�ԣ���EtherCATҪ�������ܣ���Ҫ�ѾW�������ąf�h��ȥ�����������r�ԡ�
�����Mһ���������r�ԣ�Ոʹ�����\�ӌ��T��EtherCAT�\�ӿ��ƿ�XPCIE1032��
�����P��MotionRT7�ą����O���Լ����P���}��Ո����“MotionRT7�f����” ��
���P�Y��Ո�����\�Ӽ��g�پWwww.zmotion.com.cn����ϵ���\�����P�ˆT��
03 C#�M��MotionRT7�Ŀ���_�l���_�l�h��vs2022��
1.�½�C#�Ŀ
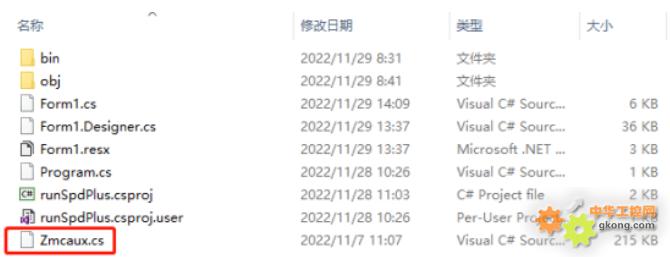
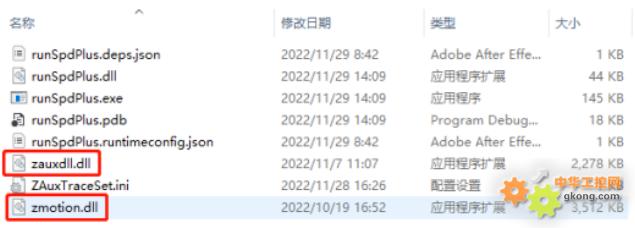
2.����“Zmcaux.cs”��“zauxdll.dll”��“zmotion.dll”
��“Zmcaux.cs”�����Ŀ�ļ��У��cbinĿ�ͬ����
��x64������“zauxdll.dll”��“zmotion.dll”����bin->x64->Debug->net6.0-windows��
3.���P�����_�l�� LOCAL���ٽӿڜyԇ �� �S�����xȡ �� ݔ��ڠ�B�Oҕ ��
���PPC������B

��1���ҵ���Ҫ�õ��Ĵ��w�M�����档
��2��ʹ��“Label” �M�������B�@ʾ�������ı��c�������@ʾ����“Button” �M�����|�l���P�ĺ������τ���ȹ������Ќ����ĽM���������У������M�Ќ��Ի���������ü��ɡ�
��3����K�Ľ���Ч���D���¡�

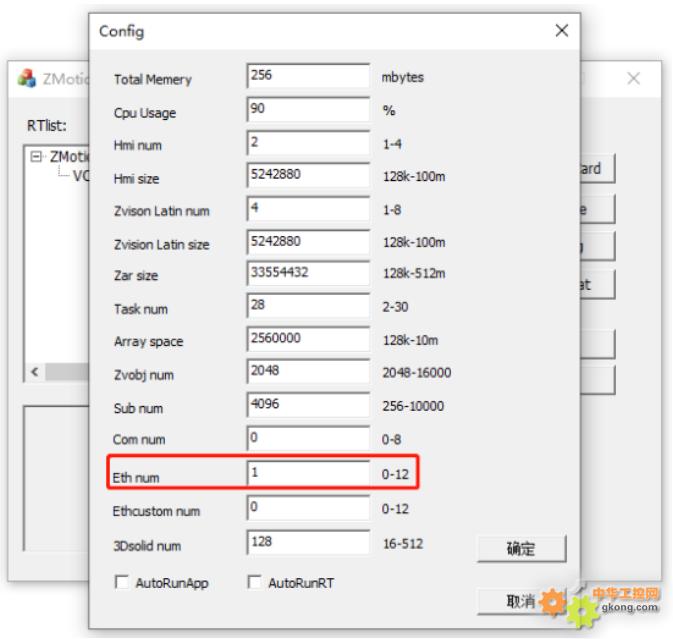
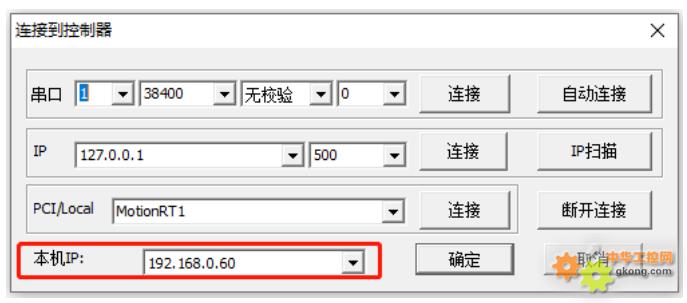
ע��ʹ��IPģʽ�B��MotionRT7�ĕr��Ҫ��MotionRT710�е�Config�����Eth num��ֵ�O�Þ�һ������0�Ĕ���1-12����ݔ���ip�鱾�Cip��������ZDevelop��ֱ�Ӳ鿴��
4.���P���a
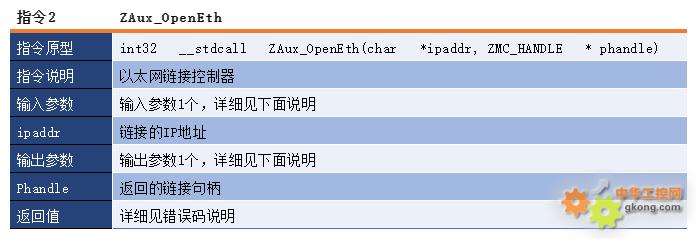
��1��ͨ�^IP朽ӷ�ʽ��朽Ӱ��o���¼�̎���������B�ӿ�������IP朽ӷ�ʽ����
private void IPConct(object sender, EventArgs e)
{
//�P�]���ƿ����������Chandle���
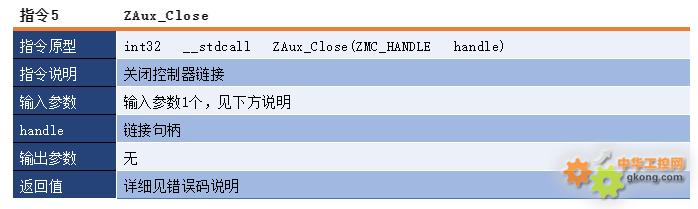
zmcaux.ZAux_Close(handle);
//�W�ڷ�ʽ�B��
int ret = zmcaux.ZAux_OpenEth(textBox1.Text, out handle);
if(ret==0)
{
label2.Text = "��朽�" + textBox1.Text;
label2.BackColor = Color.Green;
}
else
{
MessageBox.Show("朽�ʧ����Ոݔ�����_��ip��");
}
}
��2�� ͨ�^IP朽ӷ�ʽ�Ĕ��_���o���¼�̎����������_������������IP朽ӷ�ʽ�Ľ����@ʾ��
private void IPDisConct(object sender, EventArgs e)
{
//IPDisConct�������ڔ��_���������B�ӣ������W���B�ӷ�ʽ
zmcaux.ZAux_Close(handle);
label2.Text = "δ朽�";
label2.BackColor= Color.IndianRed; ;
}
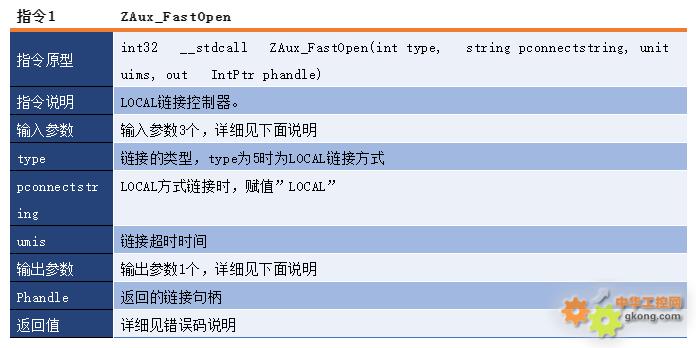
��3�� ͨ�^LOCAL朽ӷ�ʽ��朽Ӱ��o���¼�̎���������B�ӿ�������
private void localConct(object sender, EventArgs e)
{
//LOCAL��ʽ�B��
int ret = zmcaux.ZAux_FastOpen(5,comboBox2.Text,1000,out handle); if (ret == 0)
{
label5.Text = "��朽�" + comboBox2.Text;
label5.BackColor = Color.Green;
}
else
{
MessageBox.Show("朽�ʧ����Ո�x�����_��LOCAL��");
}
}
��4�� ͨ�^LOCAL朽ӷ�ʽ�Ĕ��_���o���¼�̎����������_������������LOCAL朽ӷ�ʽ�Ľ����@ʾ��
private void localDisConct(object sender, EventArgs e)
{
//IPDisConct�������ڔ��_���������B�ӣ�����LOCAL�B�ӷ�ʽ
zmcaux.ZAux_Close(handle);
label5.Text = "δ朽�";
label5.BackColor = Color.IndianRed; ;
}
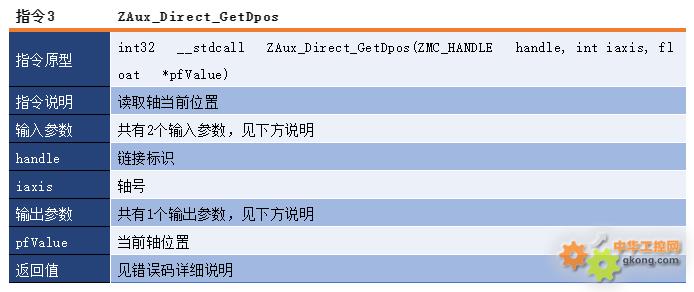
��5�� ͨ�^�Ηlָ������ڵĜyԇ���o���¼�̎��������Ӌ��Ηlָ��Ľ������ںͿ��ĕr��
private void run(object sender, EventArgs e)
{
//run�������ڜyԇ�Ηlָ��������c���ĕr
float dpos = 0;
// beforeDTӛ䛽���ָ��ǰ�ĕr��
DateTime beforeDT = System.DateTime.Now;
for (int i = 0; i < Convert.ToInt32(comboBox3.Text); i++)
{
//�M��n�Ά�ָ���
zmcaux.ZAux_Direct_GetDpos(handle, 0, ref dpos);
}
//afterDTӛ䛽���ָ��ǰ�ĕr��
DateTime afterDT = System.DateTime.Now;
//Ӌ��beforeDT�cafterDT�ĕr�g��
TimeSpan ts = afterDT - beforeDT;
//��ts�D�Q��ms���@ʾ�����ĕr��
label11.Text = (ts.TotalMilliseconds).ToString();
//Ӌ��Ηlָ������ڲ��@ʾ
label8.Text = ((ts.TotalMilliseconds * 1000) /(Convert.ToInt32(comboBox3.Text))).ToString();
label14.Text = dpos.ToString();
}
��6�� ͨ�^���lָ������ڵĜyԇ���o���¼�̎��������Ӌ����lָ��Ľ������ںͿ��ĕr��
private void runMuch(object sender, EventArgs e)
{
int []status = {0, 0 , 0 ,0};
float []dpos = { 0, 0, 0, 0 };
uint []num = { 0, 0, 0, 0 };
string cmd;
int star = 0;
StringBuilder cmdBuff = new StringBuilder(2048);
string[] tmp = new string[12];
cmd = "?dpos(0),dpos(1),dpos(2),dpos(3),axisstatus(0),axisstatus(1),axisstatus(2),axisstatus(3),in(0),in(1),in(2),in(3)";
DateTime beforeDT = System.DateTime.Now;
for (int i = 0; i < Convert.ToInt32(comboBox3.Text); i++)
{
zmcaux.ZAux_Execute(handle, cmd, cmdBuff, 2048);
}
DateTime afterDT = System.DateTime.Now;
TimeSpan ts = afterDT - beforeDT;
label23.Text = (ts.TotalMilliseconds).ToString();
label16.Text = ((ts.TotalMilliseconds * 1000) / (Convert.ToInt32(comboBox3.Text))).ToString();
string s = cmdBuff.ToString();
string[] arrS = new string[20];
for(int i = 0;i<s.Length;i++)
{
if (s[i]!=9) //9���Ʊ���’\t’��ASCII�a
{
arrS[star] += s[i];
}
else
{
star++;
continue;
}
}
}
5. �\����



6.Ч����ʾ
7.�����c�YՓ
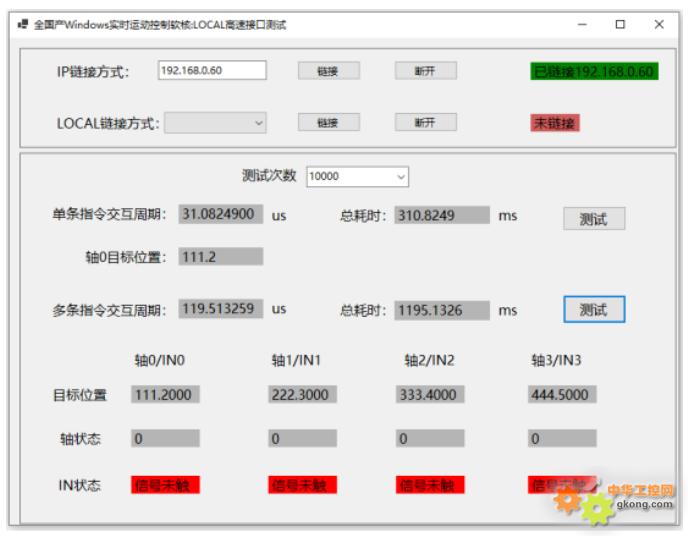
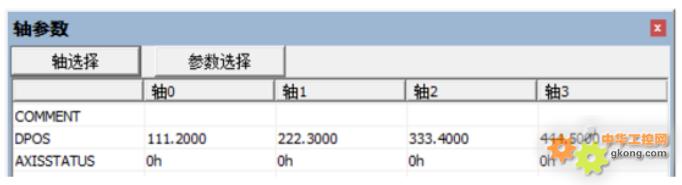
���Ϸքe�nj�IP��ʽ朽�MotionRT7�cLOCAL��ʽ朽�MotionRT7��ָ����yԇ����������\��Ч���D�Ĕ����@ʾ���������Կ������M�� 1w�� ���M�� 10w�� �Ć�ָ������ָ����ĕr��LOCAL朽ӵķ�ʽ�M��ָ�������Ҫ�ĆΗlָ����r�g�� ƽ��5us���� ����һ�����xȡ12����B�Ķ��lָ����r�g�� ƽ��18us���� ������Ҫ��IP朽ӵķ�ʽ���죨 ƽ��31us�����c119us���� ����
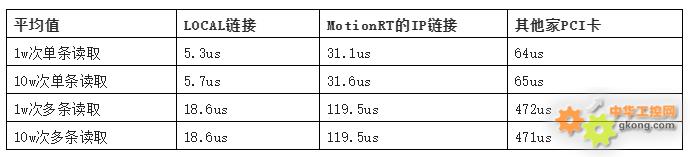
��Σ��҂����ԏ��\�нY������MotionRT7��LOCAL朽ӵķ�ʽ�£�ָ�����Ч��Ҳ�Ƿdz��ط��������yԇ������1w���ӵ�10w�r���Ηlָ����r�g�c���lָ����r�g���Ӳ����@���鹤ˇ���I�з������ṩ�˘O��ı��C��
MotionRT7�ij��F���o����һ���ش���@ϲ�c�����������҂����M�д�����ָ������^���У��ṩ�˸��õ�Ч���c�����ԣ��o���a������ߵ�Ч���c����ărֵ��
���P�ĺ���Ո����“ZMotion PC�����쾎���փ�”��

���Σ����\�Ӽ��g Windows���r�\�ӿ���ܛ�ˣ�һ����LOCAL���ٽӿڜyԇ֮C# ���ͷ������@�
���ྫ�ʃ���Ո�Pע“ ���\��С���� ”����̖����Ҫ���P�_�l�h���c���̴��a��Ո��ԃ���\�Ӽ��g�N�۹��̎���400-089-8936��
���������\�Ӽ��gԭ�����gӭ����D�d����ͬ�W����һ������Ї���������ˮƽ�����°���w���\�Ӽ��g���У������D�dՈע������Դ��
|

