�C(j��)��ҕ�X�\(y��n)��(d��ng)�����_�l(f��)ܛ��RTSys RTSys�����\(y��n)��(d��ng)�Ƴ��ļ����a(ch��n)�������I(y��)ܛ��IDE�_�l(f��)�h(hu��n)���������\(y��n)��(d��ng)����+�C(j��)��ҕ�X���ܵ��_�l(f��)ܛ����֧��
RTBasic��RTPlc���ΈD��RTHmi��C�Z�ԡ�RTVision�C(j��)��ҕ�X
�ȶ����_�l(f��)���ɻ�Ͼ��̡���(sh��)�r(sh��)���桢�ھ���ۙ�Լ��\���c�{(di��o)ԇ�����ٌ�(sh��)�F(xi��n)�����b���
ҕ�X��λ���y(c��)�����R(sh��)�e���z�y(c��)�͏�(f��)�s���\(y��n)��(d��ng)����
��ϵ�y(t��ng)���_�l(f��)��
�����P(gu��n)��RTSys�_�l(f��)ƽ�_(t��i)Ԕ���c(di��n)��→
RTSys���������С��������õ��\(y��n)��(d��ng)���Ƽ����_�l(f��)ƽ�_(t��i)���ϣ���
RTSys���������С��������õ��\(y��n)��(d��ng)���Ƽ����_�l(f��)ƽ�_(t��i)���£���
��ƪ��Ҫ��B��(n��i)�����£�
һ��ʹ��RTSys���������ļ��M(j��n)�п�����ʼ�������(q��)��(d��ng)�����M(j��n)�A�O(sh��)�����������������P(gu��n)���}����Q����
����(n��i)�݅���ZMC432M�c�ɂ�(g��)EtherCAT�(q��)��(d��ng)�Ŀ������Á��o��ҽ�B��
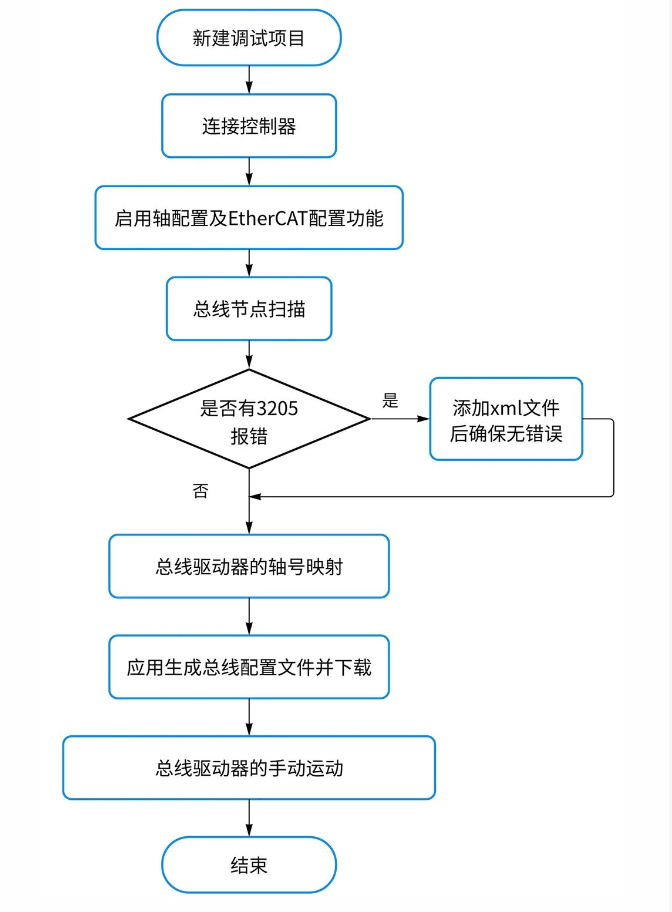
��Ҫ���̲��E���£�
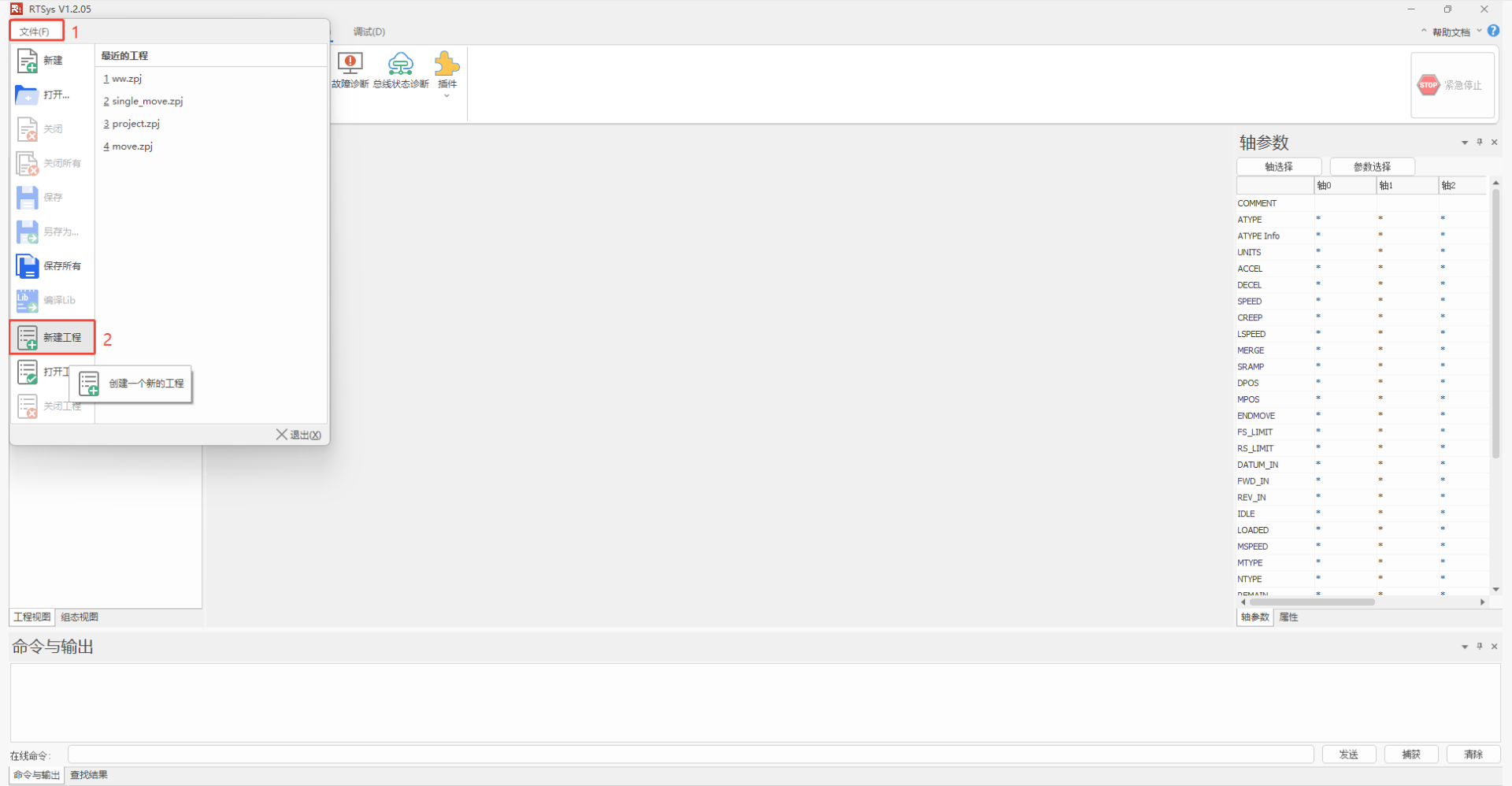
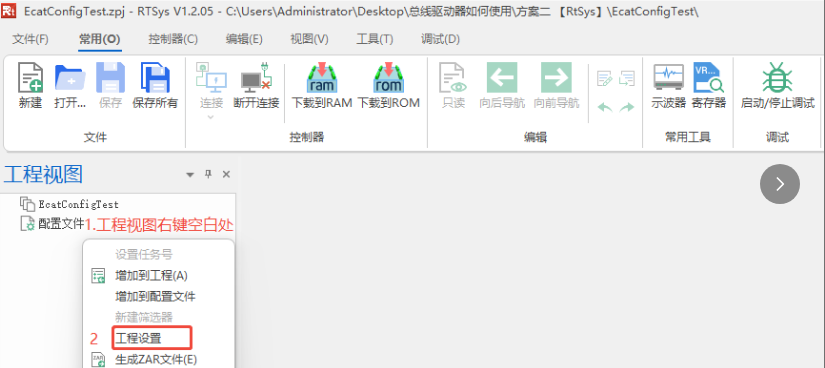
01ʹ��RTSys���������ļ��M(j��n)�п�����ʼ��RTSys���������ļ��M(j��n)�п�����ʼ�� һ���½��{(di��o)ԇ�(xi��ng)Ŀ 1.���_RTSysܛ�����c(di��n)���ˆΙڡ��ļ���→���½����̡���
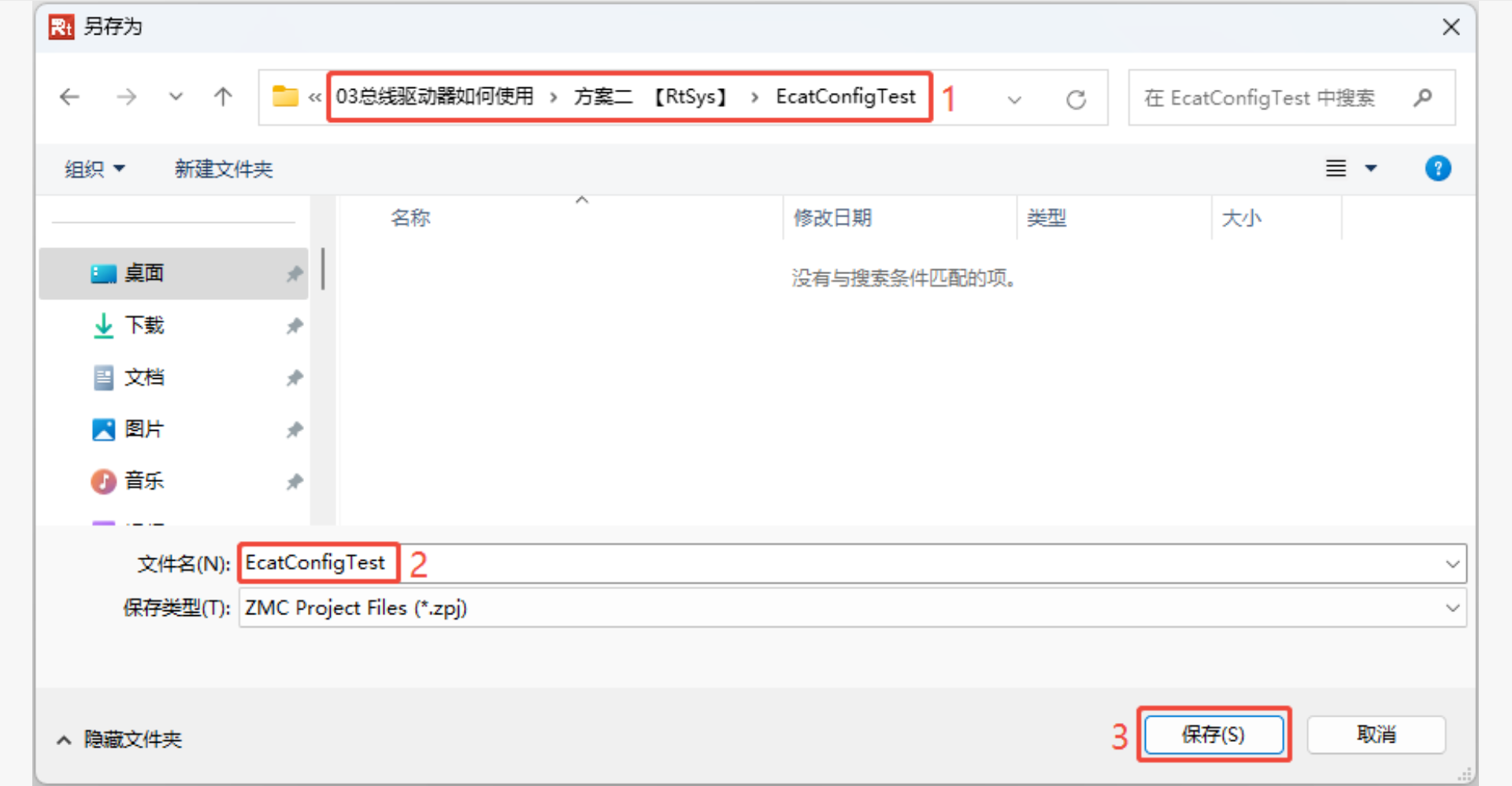
2.�����������x��·�������������ļ�����Ȼ���c(di��n)�������桿��
�����B�ӿ����� 1.RTSys�ˆΙ��c(di��n)�������á�→���B�ӡ�→������������
2.�����B�ӵ����������Ĵ��ڏ������x���B�ӷ�ʽ���B�ӡ���������
һ�����]ʹ�þW(w��ng)���B�ӣ�������Ĭ�J(r��n)IP��192.168.0.11�����ؙC(j��)�W(w��ng)��Ҫ�Ϳ�����IP��ͬһ�W(w��ng)�βſ����B���ϡ�
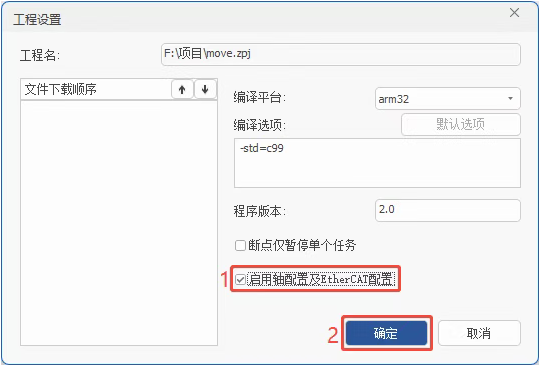
���������S���ü�EtherCAT���ù��� 1.����ҕ�D�հ�̎���I���ڏ����Ĵ����c(di��n)���������O(sh��)�á���
2.���x�������S���ü�EtherCAT���á�→���_������
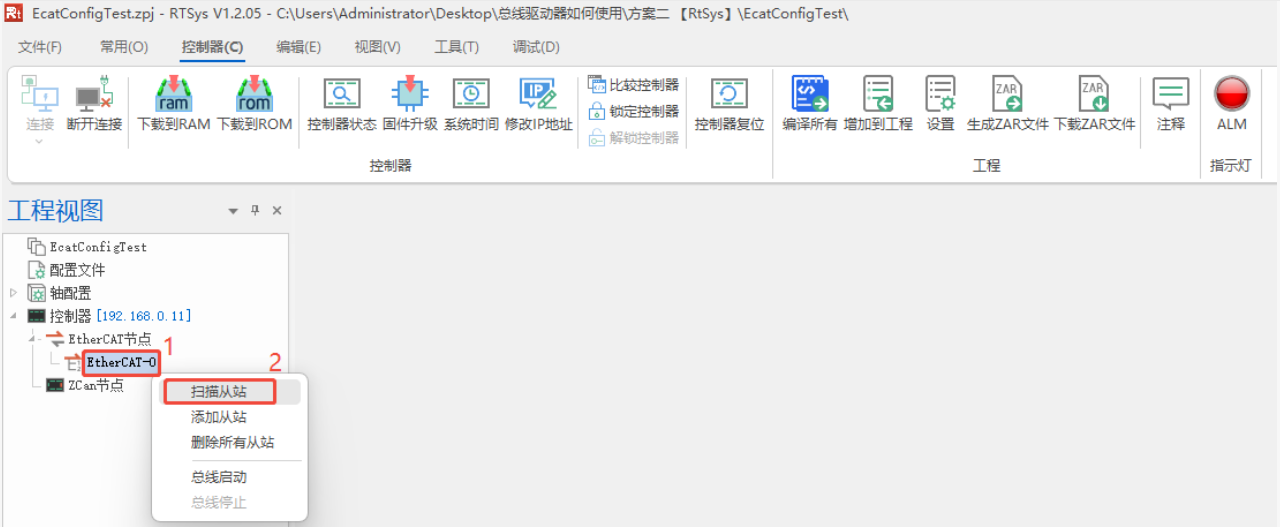
�ġ�������(ji��)�c(di��n)���� 1.���(bi��o)���I�Γ���EtherCAT��(ji��)�c(di��n)���ġ�EtherCAT-0�����ڏ����Ĵ����c(di��n)���������վ���M(j��n)�й�(ji��)�c(di��n)��վ�O(sh��)��Ē��衣
2.�ɹ������(hu��)��ÿһ��(g��)��(ji��)�c(di��n)��Ϣ�@ʾ��
�塢����XML�ļ� ���o3205��(b��o)�e(cu��)��ֱ�����^��
�����F(xi��n)3205��(b��o)�e(cu��)����(b��o)�e(cu��)��Ϣ���D���t��Ҫ���ӌ�(du��)��(y��ng)�(q��)��(d��ng)���S���ṩ��xml�ļ���“ʹ��RTSys����xml�ļ���” Ԕ��ɲ鿴���ă�(n��i)�ݡ�
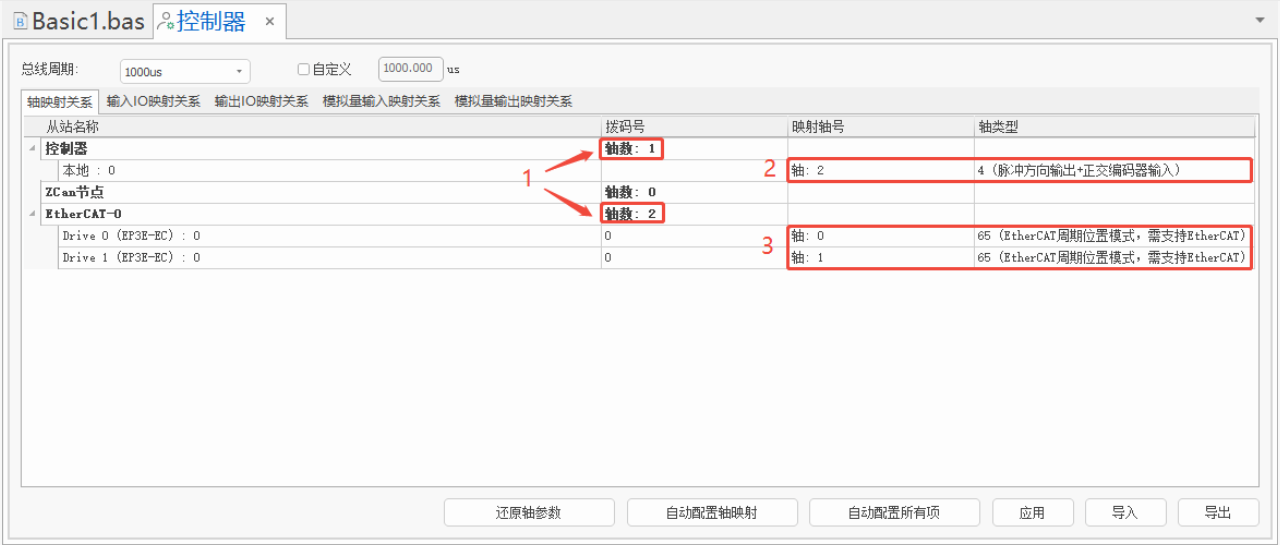
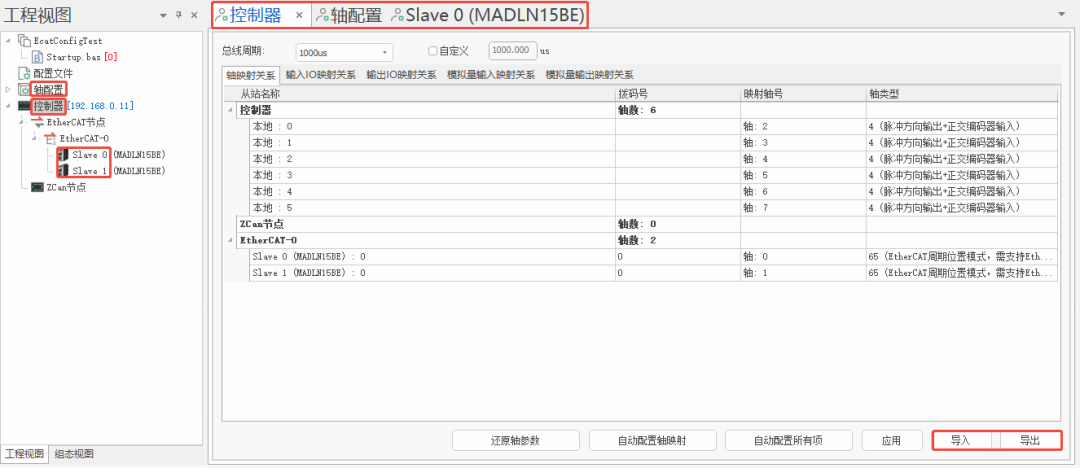
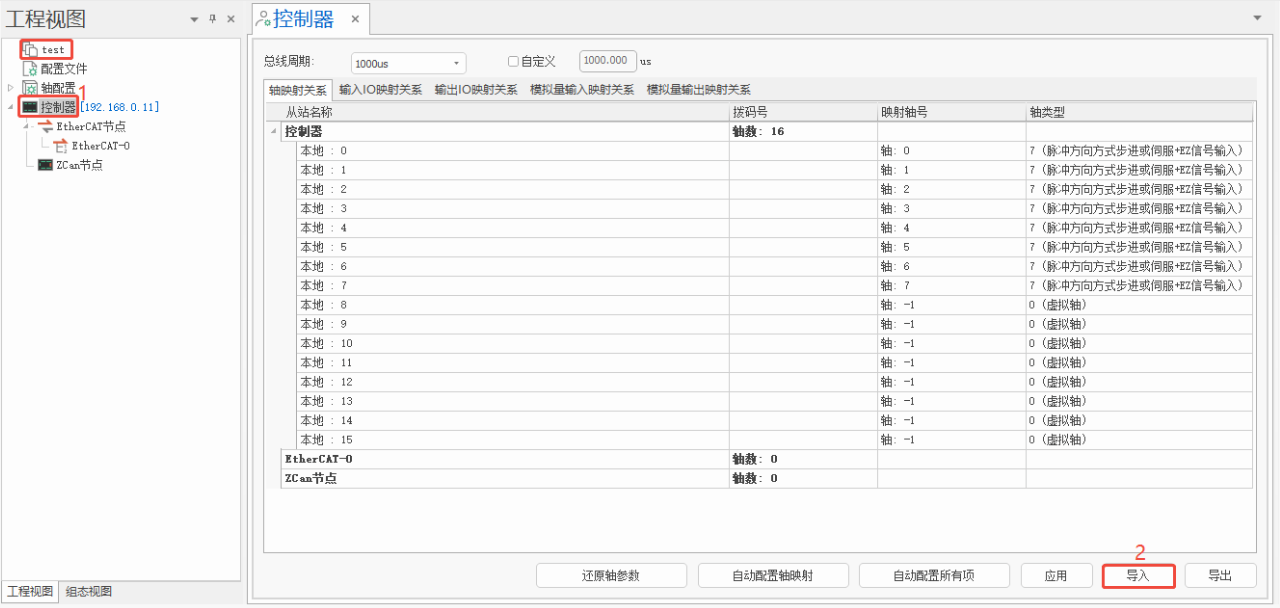
���������(q��)��(d��ng)�����S̖(h��o)ӳ�� �ڡ�����ҕ�D���p��������������Ȼ���ڏ��������ý��洰�ڸ���(j��)��(sh��)�H���������Sӳ���P(gu��n)ϵ��
�� �D�п�������ġ��S��(sh��)�������O(sh��)�ñ����}�_�S��(sh��)����
�� EtherCAT-0��ġ��S��(sh��)�������O(sh��)��EtherCAT�����ӳ�ȥ�Ŀ����S��
�� ZCan��(ji��)�c(di��n)���Á��O(sh��)��ͨ�^CAN�����U(ku��)չ�ĔU(ku��)չ�S��
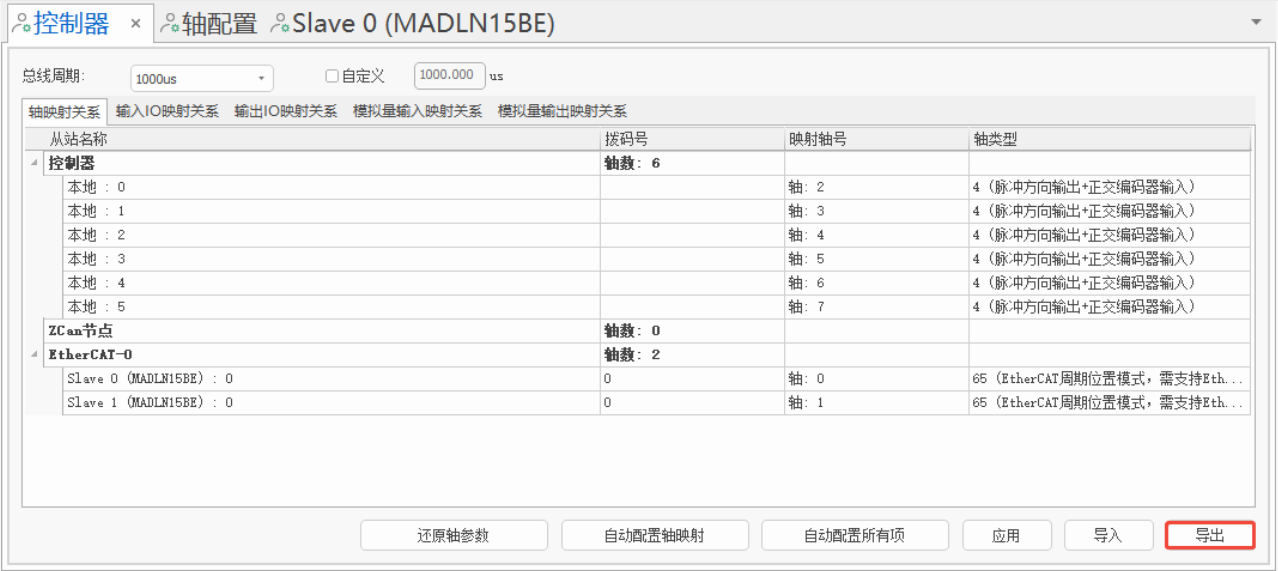
��1���ڡ��Sӳ���P(gu��n)ϵ�����棬���c(di��n)�����S��(sh��)���б�ݔ���{(di��o)�õ��S��(sh��)��ֻʹ�ÿ����(q��)��(d��ng)����Ԓ�������}�_�Sֱ���O(sh��)�Þ�0���ɣ���
��2���c(di��n)�����Ԅ�(d��ng)�����Sӳ�䡿���Ԅ�(d��ng)�O(sh��)��ӳ���S̖(h��o)���S��ͣ�Ҳ���Լ��ք�(d��ng)��ӳ���S̖(h��o)���S��͡����S��ͣ��������M(j��n)���ŷ�һ���O(sh��)�ó�65��
ʾ��һ�� ���O(sh��)�F(xi��n)��(ch��ng)�B���˃ɂ�(g��)�����(q��)��(d��ng)������һ��(g��)�(q��)��(d��ng)�����S̖(h��o)ӳ�䵽�S0�Ͽ��ƣ��ڶ���(g��)�(q��)��(d��ng)��ӳ�䵽�S1�Ͽ��ƣ���ô�������D�M(j��n)���O(sh��)�á�
ʾ���������O(sh��)�F(xi��n)��(ch��ng)�����}�_�S��axis 0���Ͻ���һ��(g��)�}�_�(q��)��(d��ng)������ͨ�^EtherCAT�����B���˃ɂ�(g��)�����(q��)��(d��ng)������һ��(g��)�����(q��)��(d��ng)�����S̖(h��o)ӳ�䵽�S0�Ͽ��ƣ��ڶ���(g��)�����(q��)��(d��ng)��ӳ�䵽�S1�Ͽ��ƣ��}�_�(q��)��(d��ng)��ӳ�䵽�S2�Ͽ��ƣ���ô�������D�M(j��n)���O(sh��)�á�
�ߡ���(y��ng)�����ɿ��������ļ������d �c(di��n)������(y��ng)�á��Ԅ�(d��ng)���������ļ���Startup.bas��Ȼ�����d�������������x�����d��ROM����(sh��)�F(xi��n)�������ĵ�����ñ��湦�ܡ��������cݔ��������ʾ“�����������”�t��ʾ������ʼ���ɹ���
�ˡ������(q��)��(d��ng)�����ք�(d��ng)�\(y��n)��(d��ng) 1.�ք�(d��ng)�\(y��n)��(d��ng)
��1��������ҕ�D��→���S���á�→���Sn�����ȹ��x���Ԅ�(d��ng)���d�S����(sh��)����
��2���S��ʹ�ܿ��ƅ^(q��) ���c(di��n)���Sʹ�ܺ���ġ��ГQ�����o�M(j��n)�І��Sʹ�ܡ�
��3�����S����(sh��)�^(q��) ���O(sh��)�Ì�(du��)��(y��ng)���S����(sh��)�����}�_��(d��ng)�������] �O(sh��)�óəC(j��)�_(t��i)�\(y��n)��(d��ng)1mm����Ҫ���}�_��(sh��)�������ٶȡ��͡��p�ٶȡ�һ���O(sh��)�ó��ٶȵ�10��������Ҫ��(du��)�Ӝp���A���M(j��n)��ƽ��̎����S����һ���O(sh��)�ó�100ms��
��4���_���S����(sh��)��ȫ����r�£��c(di��n)���ք�(d��ng)�\(y��n)��(d��ng)�^(q��) �ġ������\(y��n)��(d��ng)�����ߡ������\(y��n)��(d��ng)����������c(di��n)��(d��ng)�\(y��n)��(d��ng)�����¾��\(y��n)��(d��ng)�����_��ֹͣ����ͬ�r(sh��)���Sλ�ü���B(t��i)��Ϣ �ġ�����λ�á���ʾ��MPOS�Ƿ���׃����
ע��������λ����׃�������ۛ]���^�쵽�S�\(y��n)��(d��ng)��������ǡ��}�_��(d��ng)����*���ٶȡ��ĽY(ji��)��̫С����(d��o)���S�\(y��n)��(d��ng)�ı��^�����@��(g��)�r(sh��)����ѡ��}�_��(d��ng)����10��10�������Ӻ�(f��)�y(c��)ԇ��
�������o���w���ܿ��ԅ����·�����
���o���Q ��������
�Ԅ�(d��ng)���d�S����(sh��) �Ԅ�(d��ng)��“�S����”�еą���(sh��)�������d���������У�ͬ����“�S����(sh��)”�����У�
��(y��ng)���������S ����(d��ng)ǰ�S�����õ��S����(sh��)��(y��ng)���������S����Ҫ�ȹ��x“�Ԅ�(d��ng)���d�S����(sh��)”����Ч��
���d�S����(sh��) ��“�S����”�еą���(sh��)�������d���������У�ͬ����“�S����(sh��)”�����У�
�xȡ�S����(sh��) ��“�S����(sh��)”�����еą���(sh��)�����xȡ����(y��ng)�õ�“�S����”�еą���(sh��)
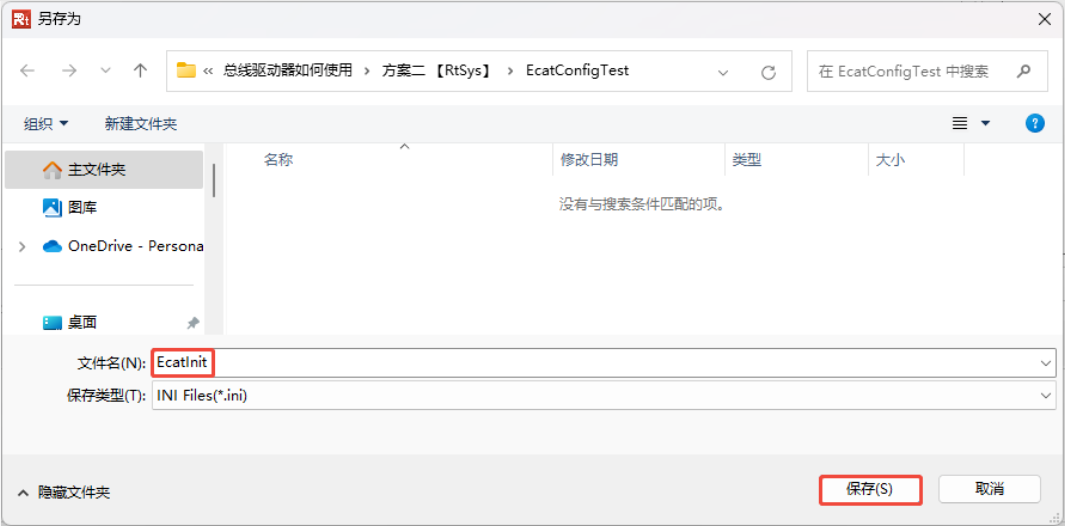
����S����(sh��) ����(d��ng)ǰ�S�����õ��S����(sh��)��ݲ�����.ini�ļ��ڹ���·���ļ��A��
�֏�(f��)�S����(sh��) ����(d��ng)ǰ�S����(sh��)�֏�(f��)�����ļ��еą���(sh��)
�����\(y��n)��(d��ng) ���Ʈ�(d��ng)ǰ�S�������\(y��n)��(d��ng)
�����\(y��n)��(d��ng) ���Ʈ�(d��ng)ǰ�S�������\(y��n)��(d��ng)
������m(x��)�\(y��n)��(d��ng) ���Ʈ�(d��ng)ǰ�S�����m(x��)�ķ����\(y��n)��(d��ng)
������m(x��)�\(y��n)��(d��ng) ���Ʈ�(d��ng)ǰ�S�����m(x��)�������\(y��n)��(d��ng)
����(f��)�\(y��n)��(d��ng) ���Ʈ�(d��ng)ǰ�S���O(sh��)��λ�ü��Δ�(sh��)������(f��)�\(y��n)��(d��ng)
ֹͣ ֹͣ��(d��ng)ǰ�S�\(y��n)��(d��ng)
2.�S����(sh��)����
��������O(sh��)�õ��S����(sh��)��Ҫ���浽�����ļ����棬�҂������c(di��n)�����S���á�→����(y��ng)�á����@��(g��)�r(sh��)���(hu��)�Ԅ�(d��ng)��������Ϣ���뵽��Startup.bas���ļ����棬Ȼ�����d���c(di��n)�������d��ROM����Ԓ���Ԍ�(sh��)�F(xi��n)�������S����(sh��)�ĵ�늱��档
���ˣ�������ʼ����ɣ���������ք�(d��ng)�\(y��n)��(d��ng)�{(di��o)ԇ��
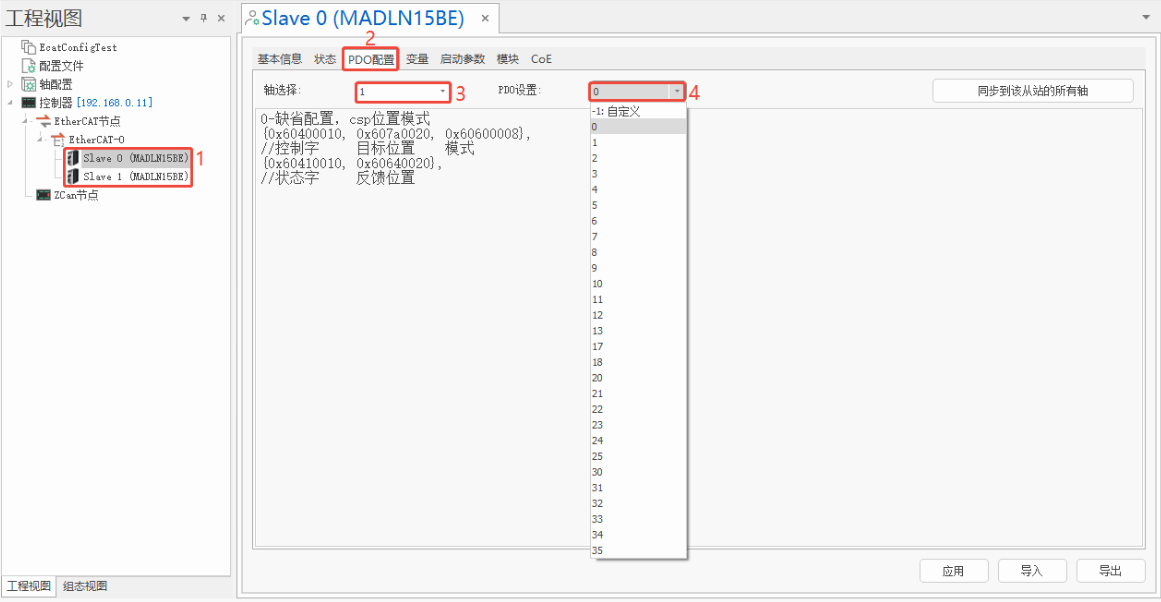
02�(q��)��(d��ng)�����M(j��n)�A�O(sh��)�� һ�������(q��)��(d��ng)����PDOģʽ�O(sh��)�� ��EtherCat��(ji��)�c(di��n)���ҵ��(q��)��(d��ng)����Slave/Drive�_�^�ġ��p�����c(di��n)����PDO���á����ڡ�PDO�O(sh��)�á����������挦(du��)����(g��)�(q��)��(d��ng)�������M(j��n)���O(sh��)�� ��
�����S���}�_�(q��)��(d��ng)������Ҫ�M(j��n)��PDO���ã����ǽ���EIO�U(ku��)չģ�K�S�ϵ��}�_�(q��)��(d��ng)����Ҫ�M(j��n)��PDO���ã���(sh��)�H�ஔ(d��ng)�ڿ����(q��)��(d��ng)������Ҫ�����(q��)��(d��ng)����PDOģʽ�ǰ��Լ��������õģ���ſ��Y(ji��)�����N��Ҋ������
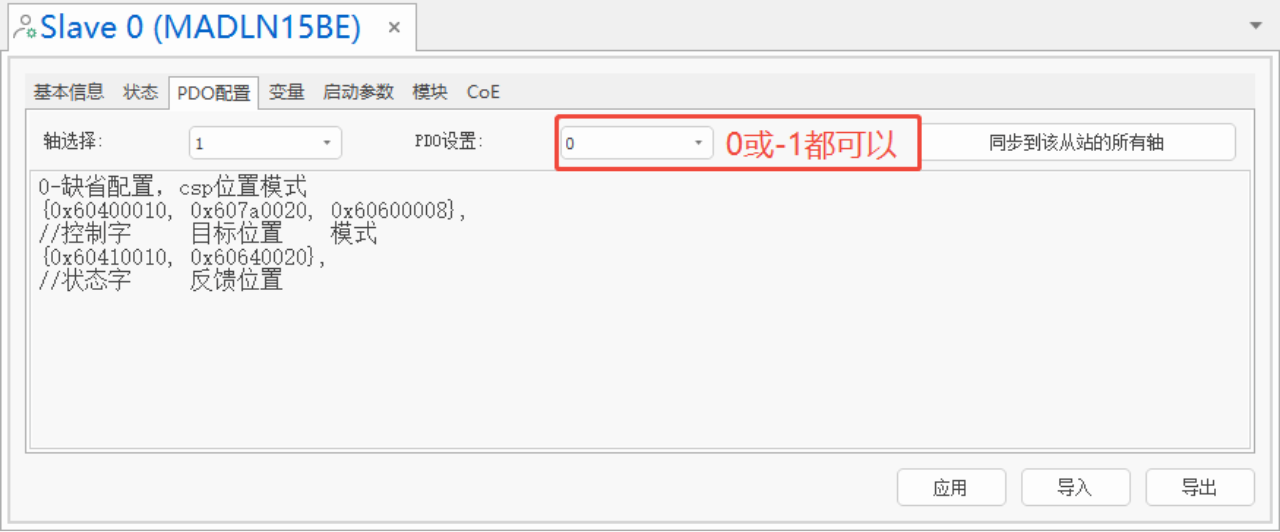
����1��
�����܂�(g��)λ��ģʽ������Ҫ�O(ji��n)���(q��)��(d��ng)����IO��Ϣ��Drive_profile=0����-1��PDO�O(sh��)��0����-1���ɡ�
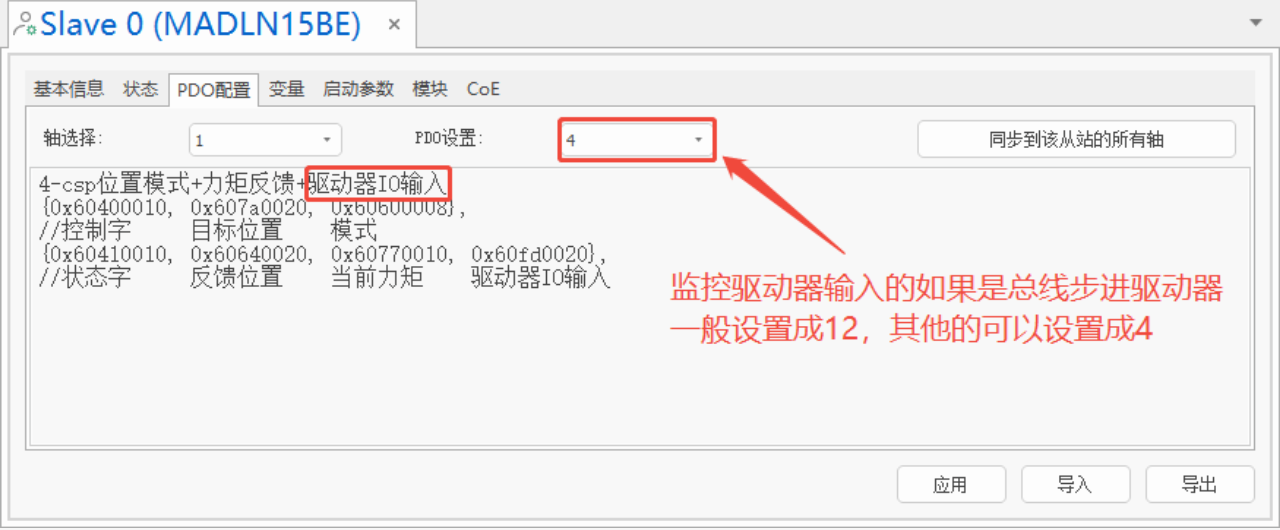
����2��
�����܂�(g��)λ��ģʽ����Ҫ�O(ji��n)���(q��)��(d��ng)����IO��Ϣ��PDO�O(sh��)����Ҫ�x�����(q��)��(d��ng)��IOݔ���ģʽ����ģʽ4��5��
����3��
��Ҫλ��ģʽ������ģʽ�����ГQ����Ҫ�O(ji��n)���(q��)��(d��ng)����IO��Ϣ��PDO�O(sh��)����Ҫ�x��λ�ú��D(zhu��n)�ص�ģʽ����ģʽ34��
Tip������(g��)�S���������úõ�һ��(g��)�S���x��ͬ����ԓ��վ�����S���M(j��n)��һ�Iͬ�������S��
��(d��ng)ǰ������Ҫ����ֱ���c(di��n)������(y��ng)�á����������d�����������ɡ�
Tip��PDO���õ�����ģʽ�ɲ鿴����“Ԕ��PDOģʽ�x��”��
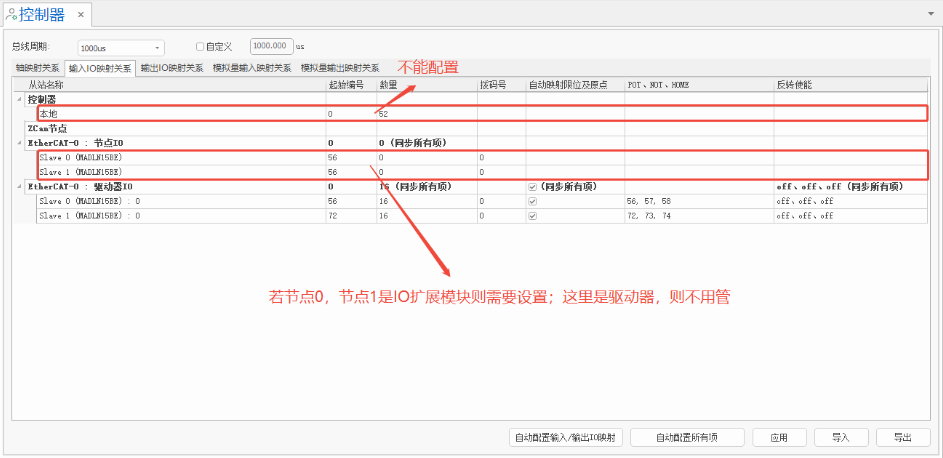
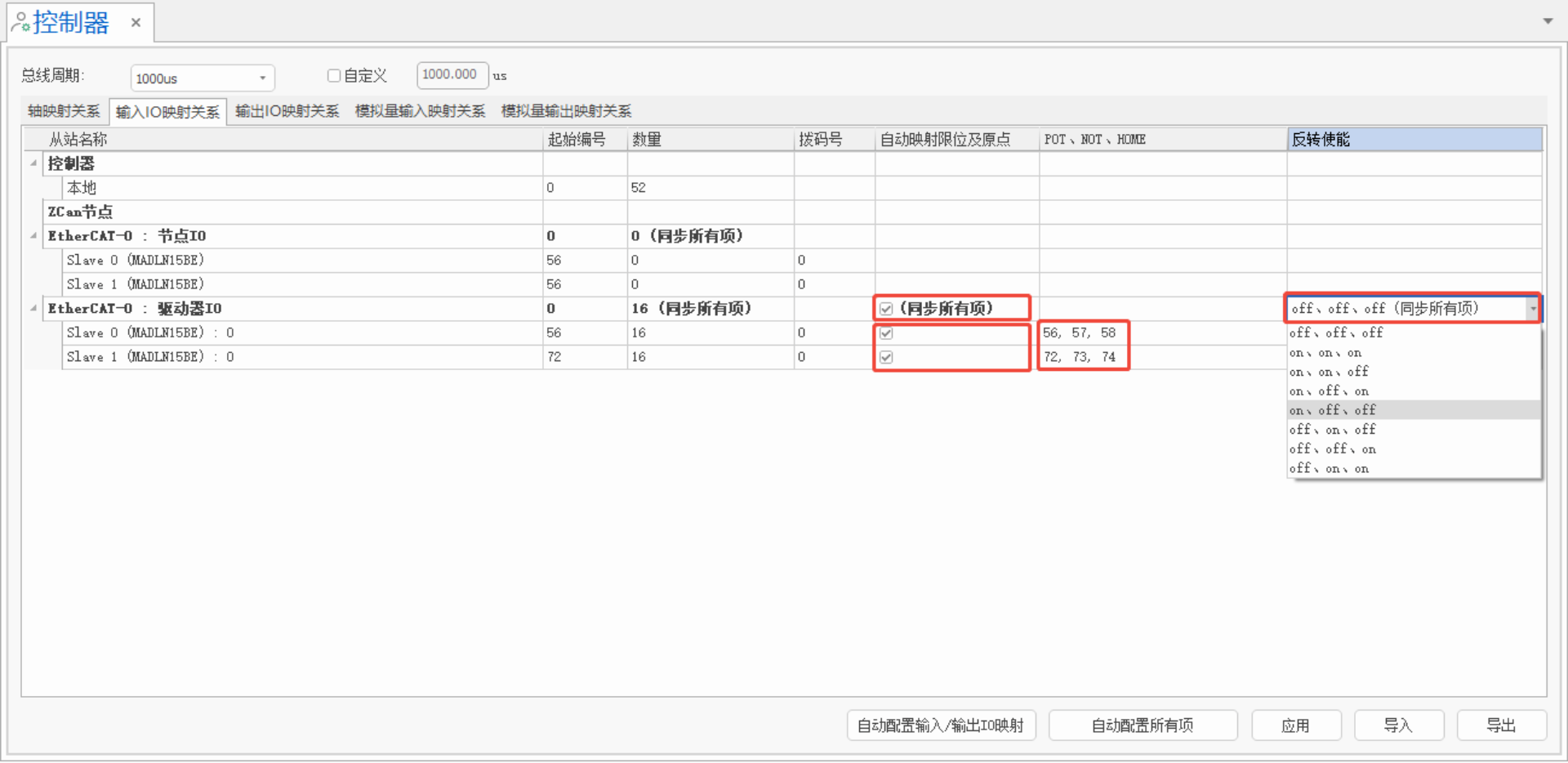
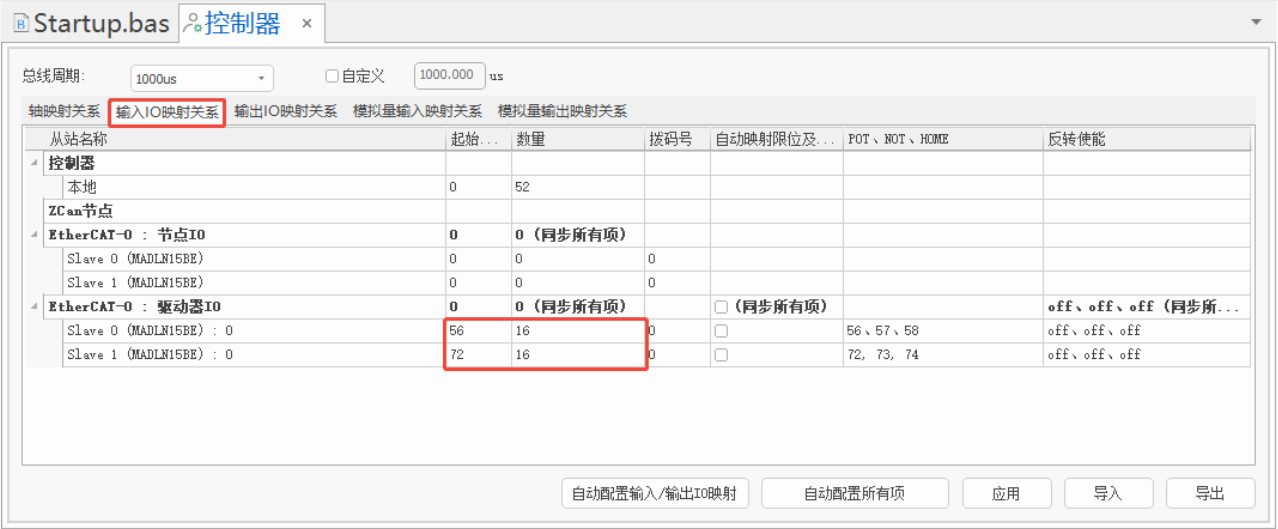
���������(q��)��(d��ng)����IOӳ�䵽�(q��)��(d��ng)���ϣ����(q��)��(d��ng)���oIO���tֱ�����^�� 1.�ڡ�����ҕ�D���p�������������x��ݔ��IOӳ���P(gu��n)ϵ�����x�(xi��ng)�����������w�Ĕ�(sh��)����IO��ʼ��̖(h��o)�͔�(sh��)����ܛ������(j��)��������̖(h��o)�Ԅ�(d��ng)�R(sh��)�e�ģ���֧�־��ġ�
2.��EtherCAT-0:��(ji��)�c(di��n)IO�����O(sh��)��IO�U(ku��)չģ�K�� ���(q��)��(d��ng)���Ĺ�(ji��)�c(di��n)�ڡ�EtherCAT-0:�(q��)��(d��ng)��IO���@���O(sh��)�á�
3.��EtherCAT-0:�(q��)��(d��ng)��IO�����O(sh��)��EtherCAT�����(q��)��(d��ng)����IO��ʼ��̖(h��o)�͔�(sh��)���ġ� ���O(sh��)�úø���(g��)�(q��)��(d��ng)����IO��(sh��)��һ���O(sh��)�Þ飨16�ı���(sh��)�����ڎ��С�ͬ�������(xi��ng)����λ��һ�I�O(sh��)�������(q��)��(d��ng)��IO��(sh��)�����O(sh��)�úú��c(di��n)�����Ԅ�(d��ng)����ݔ��/ݔ��IOӳ�䡿���ɡ�
ע���U(ku��)չӳ���IO������Ҫ���ڛ_ͻ������ʼ��̖(h��o)��8�ı���(sh��)��
4.����Ҫ�Ԅ�(d��ng)ӳ����ؓ(f��)��λ��ԭ�c(di��n)�_�P(gu��n)���������¹��x���Ԅ�(d��ng)ӳ����λ����ԭ�c(di��n)�� �����¹��x��ͬ�������(xi��ng)���t��(hu��)һ�I���������(q��)��(d��ng)����λ��ԭ�c(di��n)��
ע�⣺ZMCϵ�е�����ݔ�붨�x����Ҫ��̖(h��o)���D(zhu��n)����?y��n)�ZMCϵ����OFF��Ч�����Է��D(zhu��n)��ON��Ч�����������x��(du��)��(y��ng)ݔ���Ƿ��D(zhu��n)ʹ�ܡ���
���Ԅ�(d��ng)���������(xi��ng)���t�nj��Sӳ�䡢IO��ģ�M��ӳ��ȫ���Ԅ�(d��ng)���á�
��(d��ng)ǰ������Ҫ����ֱ���c(di��n)������(y��ng)�á����������d�����������ɡ�
Tip���������Ì�(d��o)����(y��ng)�����������̿ɲ鿴����“����������Ό�(d��o)����(y��ng)������������”��
�����(q��)��(d��ng)����IO�O(ji��n)�ء���λԭ�c(di��n)�O(sh��)�ü����� �����������ɲ����O(sh��)�ã��҂��Ϳ��Ԍ�(du��)�(q��)��(d��ng)���M(j��n)��IO�O(ji��n)�صȲ����ˡ�
1.�(q��)��(d��ng)�������ݔ��IOӳ�䡣
2.PDO��ģʽҪ�x����ڌ�(du��)��(y��ng)IO��Ϣ�Ĕ�(sh��)��(j��)�ֵ��ģʽ��
��1���(q��)��(d��ng)����IO�O(ji��n)�أ�����(g��)������������Ƿ�O(ji��n)���(q��)��(d��ng)��IO��
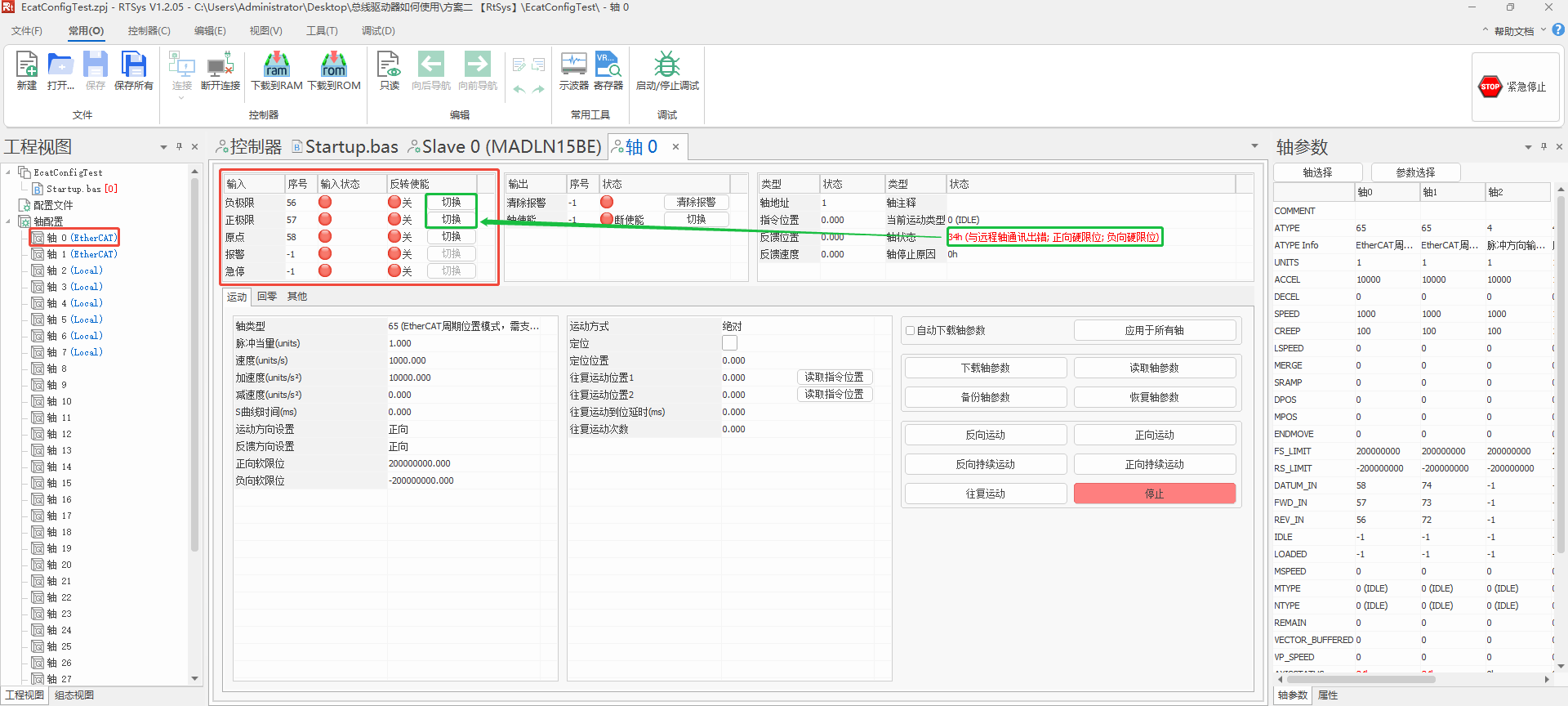
������ҕ�D��-�x��Ҫ�O(ji��n)�ص��(q��)��(d��ng)��-����B(t��i)��-ݔ�롾�c(di��n)�����x��-��ݔ��ڱO(ji��n)�ؽ��桿���ڏ�����ݔ��ڽ�����Կ����ɷN��̖(h��o)����0��1��2��3....15���@��(g��)�Ǯ�(d��ng)ǰ�(q��)��(d��ng)����ݔ��ھ�̖(h��o)��������̖(h��o)��(n��i)�硾56��57��58....71���Ǯ�(d��ng)ǰ�(q��)��(d��ng)��ݔ���ӳ�䵽�������Ϸ����IO��̖(h��o)�������Ǟ��˷�ֹ�(q��)��(d��ng)��ݔ��ھ�̖(h��o)�Ϳ�������ݔ��ھ�̖(h��o)�_ͻ��
��2���(q��)��(d��ng)����λԭ�c(di��n)�O(sh��)��
�c(di��n)��������ҕ�D��→���S���á�→���Sn��→���S�{(di��o)ԇ���桿�����S�{(di��o)ԇ��������Ͻ���һ�K�^(q��)����ӳ��ԓ�SӲ����λ��ԭ�c(di��n)����(b��o)����̖(h��o)�ͼ�ͣ�_�P(gu��n)�Č�(du��)��(y��ng)ݔ����ڿ������ϵ�IO��̖(h��o)��һ�㿂���(q��)��(d��ng)���Dz���Ҫ�ӈ�(b��o)����̖(h��o)�ͼ�ͣ�_�P(gu��n)�����O(sh��)�ó�-1��������̖(h��o)����(sh��)�HIO�Ӿ��O(sh��)�á�
�O(sh��)�����������Dһ�Ӱl(f��)�F(xi��n)�S�]��������ؓ(f��)��λ�����S��B(t��i)��ʾ����Ӳ����λ��ؓ(f��)��Ӳ����λ���@��(g��)��������̖(h��o)���_/���]��Ӱ푣������c(di��n)�����D(zhu��n)ʹ�ܵġ��ГQ�����o��(du��)��ؓ(f��)Ӳ����λ�Ġ�B(t��i)�M(j��n)���ГQ�O(sh��)�á�
��3���(q��)��(d��ng)���Ļ���
�ٜy(c��)ԇ�S�Ļ��㹦��֮ǰҪ�ȱ��C�ք�(d��ng)�\(y��n)��(d��ng)�������ք�(d��ng)�\(y��n)��(d��ng)�ķ���Ҳ������
���c(di��n)�������㡿���o�����M(j��n)���S�Ļ�����档
��������x�����ÿ��������㷽ʽ������ôĬ�J(r��n)��ʹ�ÿ����(q��)��(d��ng)�����㣨���ȸ������]ʹ�ã����@��(g��)�r(sh��)����㷽ʽ�Ľ�B��Ҫ�������(q��)��(d��ng)�����փ�(c��)��(du��)����ģʽ�Ľ�B��ͬ�r(sh��)ԭ�c(di��n)��������Ҫ�ӵ��(q��)��(d��ng)����ԭ�c(di��n)ݔ����ϡ�
������x�����ÿ��������㷽ʽ������ôʹ�õ��ǿ��������㣬���㷽ʽ���ԅ���������Ľ�B�������(q��)��(d��ng)����(sh��)�H�(xi��ng)Ŀ߀�����]ʹ�ÿ����(q��)��(d��ng)�����㡣
���O(sh��)�ú��m�ġ��ٶȡ�����ԭ�c(di��n)���ٶȣ����������ٶȡ�������ԭ�c(di��n)���������x�_ԭ�c(di��n)���ٶȣ��������ٶȡ��p�ٶȡ�߀��һ���O(sh��)�ó��ٶȵ�10����
�������ؓ(f��)��λ��Ҫ���D(zhu��n)��ôԭ�c(di��n)��̖(h��o)Ҳ��Ҫ���D(zhu��n)��
�ݴ��_�Sʹ�ܡ�
���c(di��n)��������(d��ng)���㡿�����_ʼ���㣬��Ҫֹͣ�c(di��n)����ֹͣ�����o���ɣ���Ҫ����(bi��o)�����c(di��n)��������(bi��o)���㡿���o���ɡ�
Tip��ʹ�ÿ��������㷽ʽ��Ҫ�ք�(d��ng)���㣬������ɺ��C�Sָ��λ�úͷ���λ�ö���0��
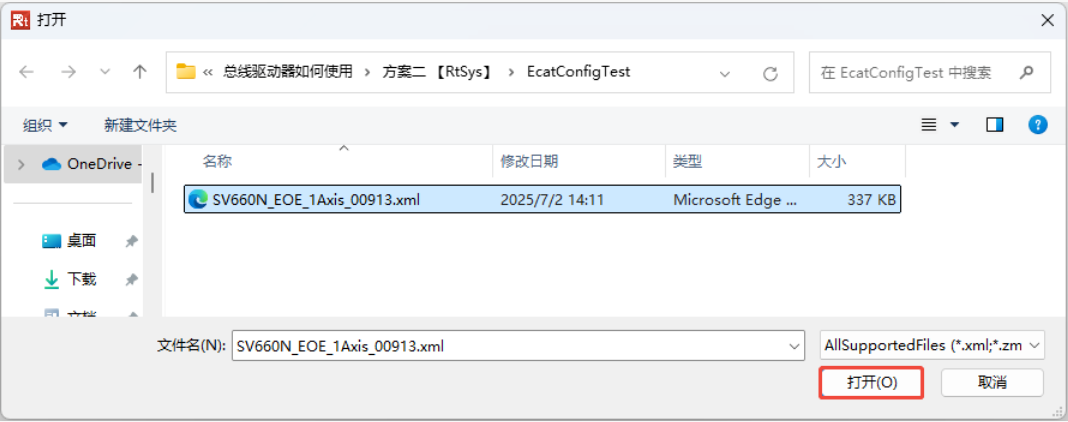
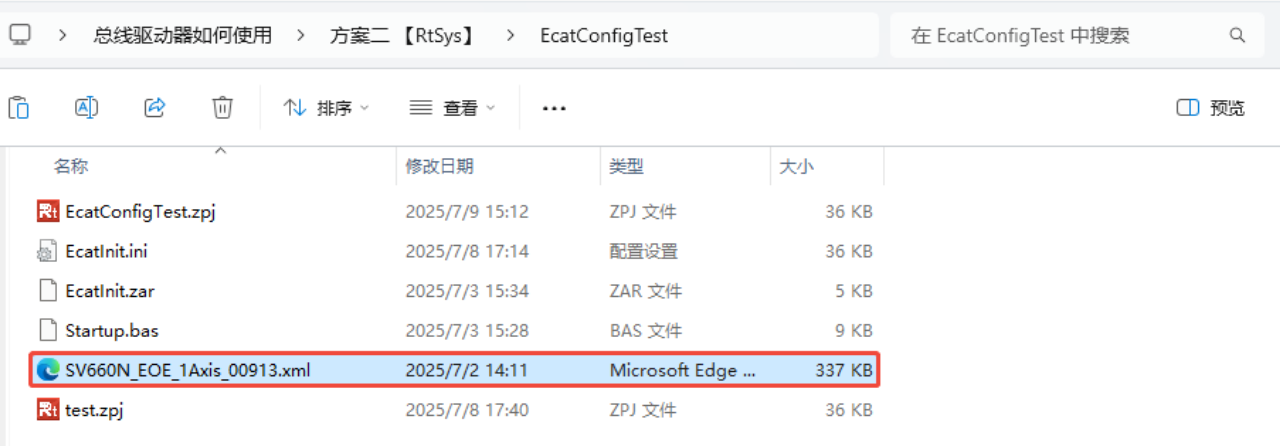
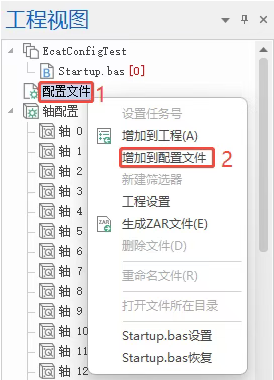
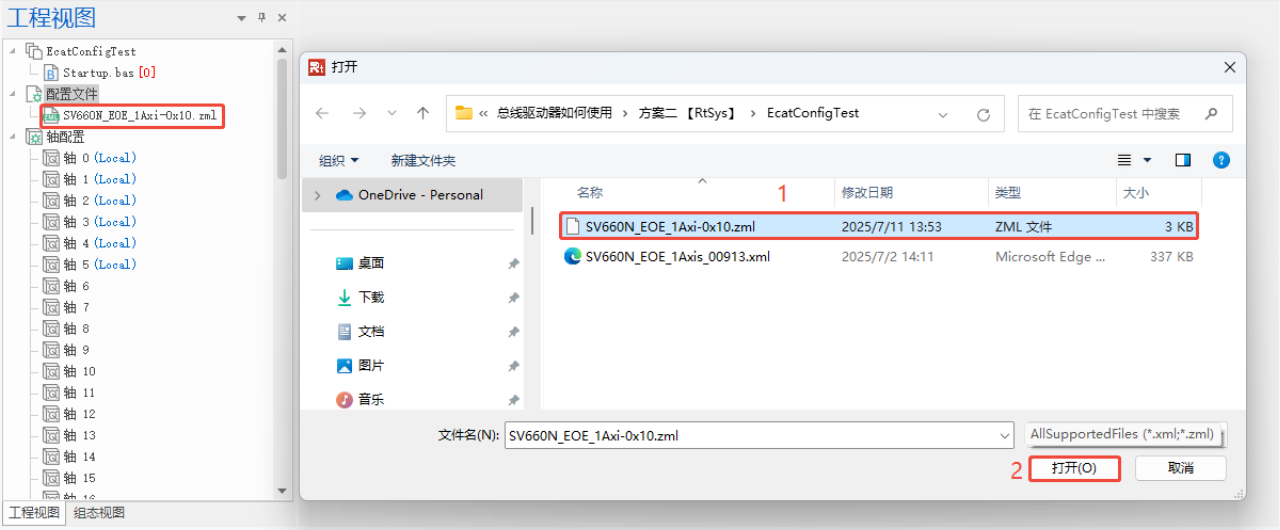
03�����������P(gu��n)���}����Q���� һ��ʹ��RTSys����xml�ļ��� 1.����(du��)��(y��ng)�(q��)��(d��ng)����xml/zml�ļ���(f��)�Ƶ�����·�����ļ��A�
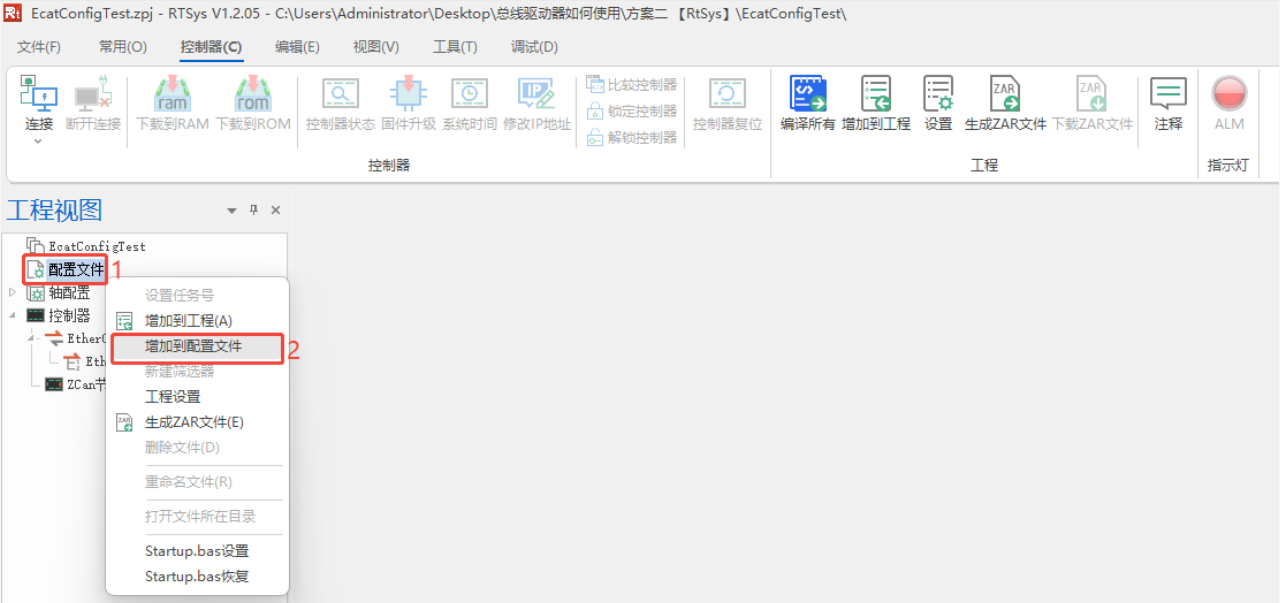
2.������ҕ�D��→�������ļ���→�����ӵ������ļ�����
3.�x��Ŀ��(bi��o)xml/zml�ļ�-�����_����
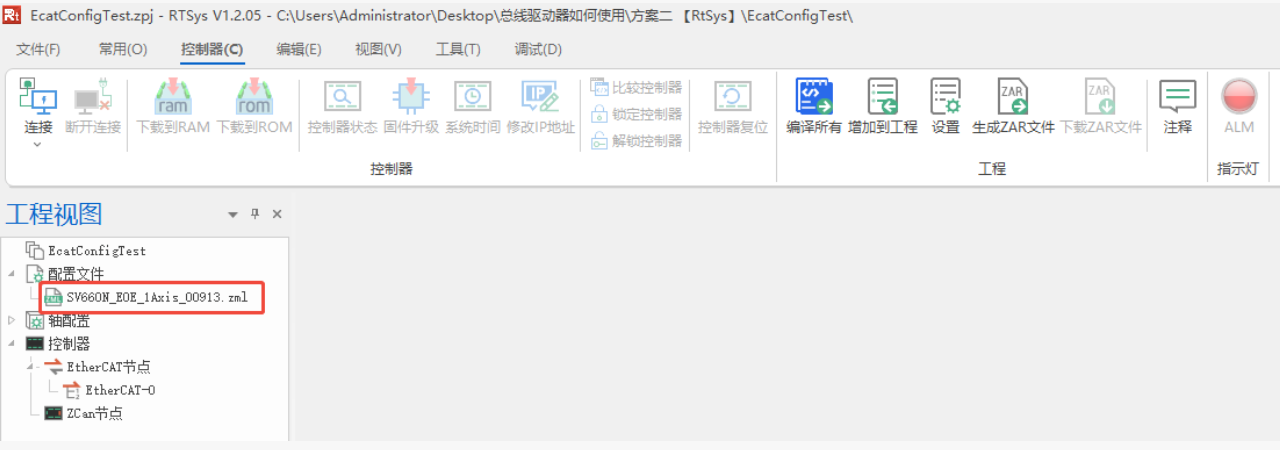
4.�@��xml/zml�ļ������ӵ������ļ����ˡ�(ע��xml�ļ����ӕ�(hu��)�Ԅ�(d��ng)�D(zhu��n)��zml�ļ�)
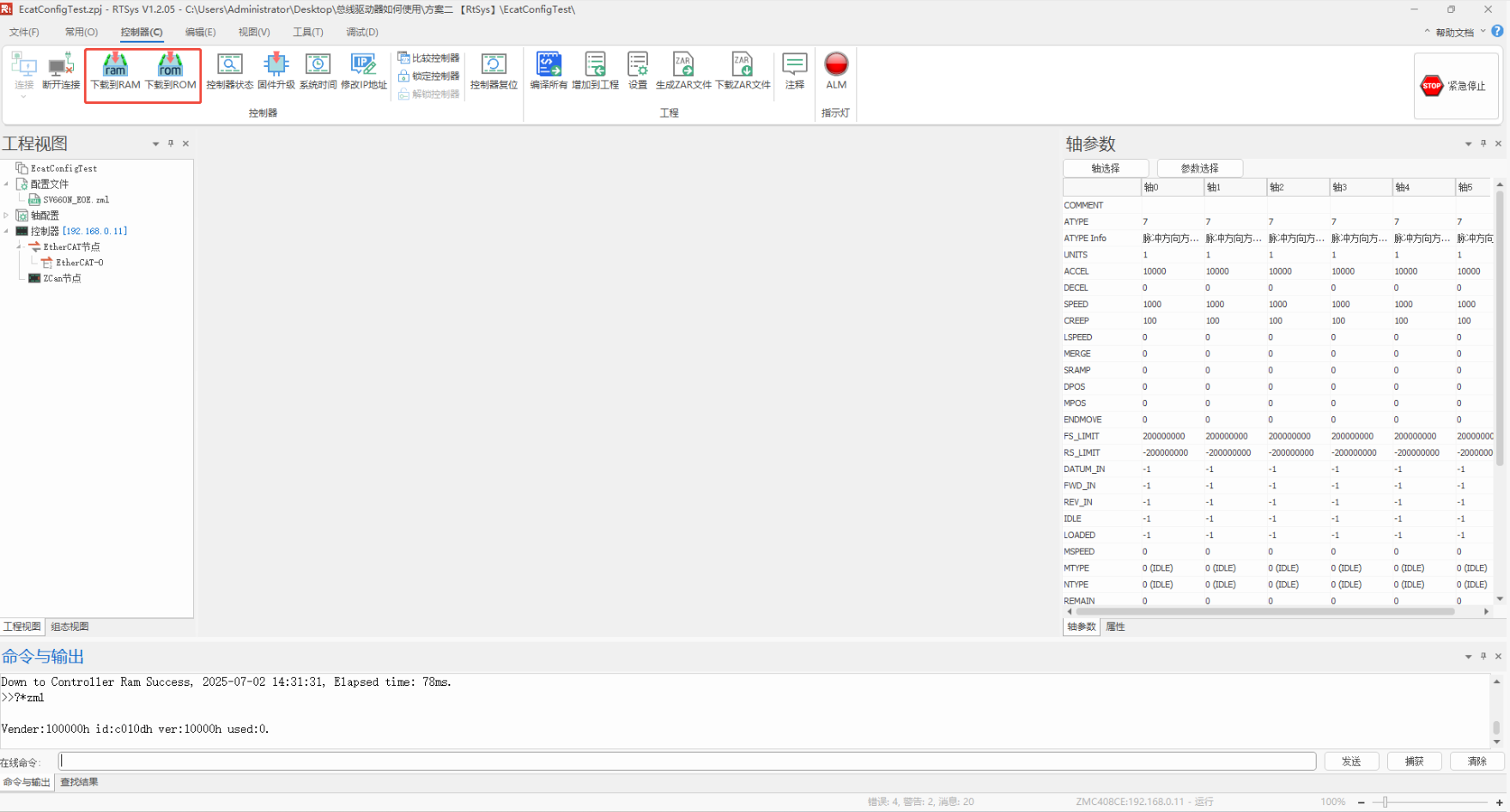
5.���Ӻ��c(di��n)�������d��RAM/ROM�����ɰ�XML�ļ�����Ϣ��(d��o)�뵽��������ʹ�������R(sh��)�eԓ�O(sh��)�䡣Ȼ�������M(j��n)�п�����(ji��)�c(di��n)���輴�ɡ�
Tip������RTSys������xml/zml�ļ���Ȼ��(b��o)�e(cu��)3205��Ԓ���t��Ҫʹ��xml�D(zhu��n)�Q���ߡ����wԔ��ɲ鿴����“���ʹ��XMLParsingToolsС��������ZML�ļ������ӣ�”
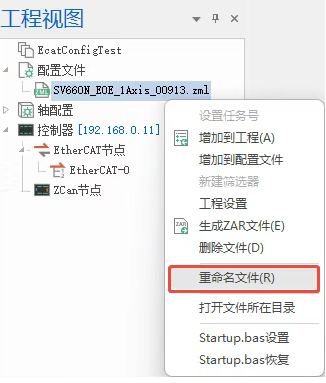
6.�����һ��������(b��o)�e(cu��)Error:20013,File name too long.�����Ixml/zml�ļ����������ļ����s���ļ�����20�ַ��ԃ�(n��i)��Ȼ�����¡����d��RAM/ROM�����ٴ��M(j��n)�п�����(ji��)�c(di��n)���衣
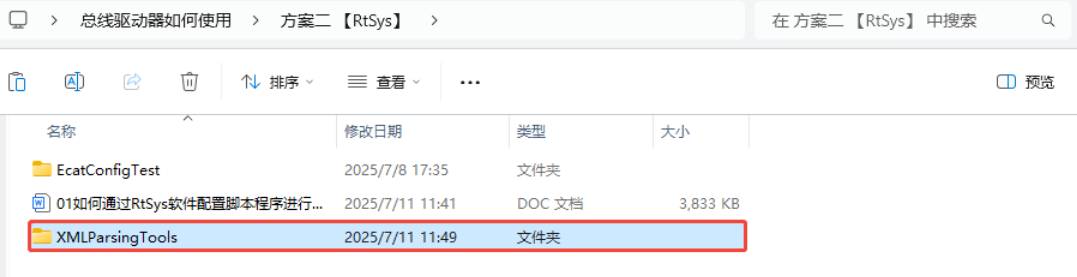
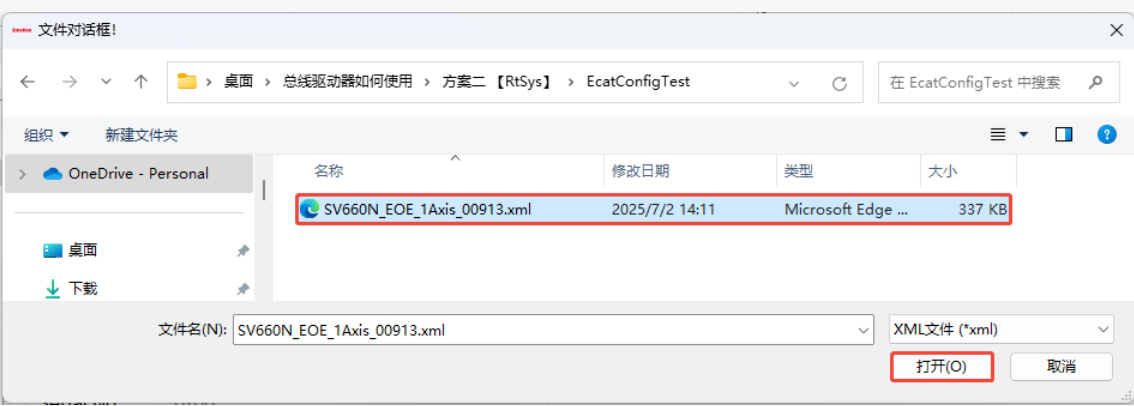
�������ʹ��XMLParsingToolsС��������ZML�ļ������ӣ� 1.����(du��)��(y��ng)�(q��)��(d��ng)����xml�ļ���(f��)�Ƶ�����·�����ļ��A�����ܛ�����������\(y��n)��(d��ng)���g(sh��)�پW(w��ng)-���g(sh��)�c֧��-���d����-����ܛ�������d��
2.���_XMLParsingTools�ļ��A��
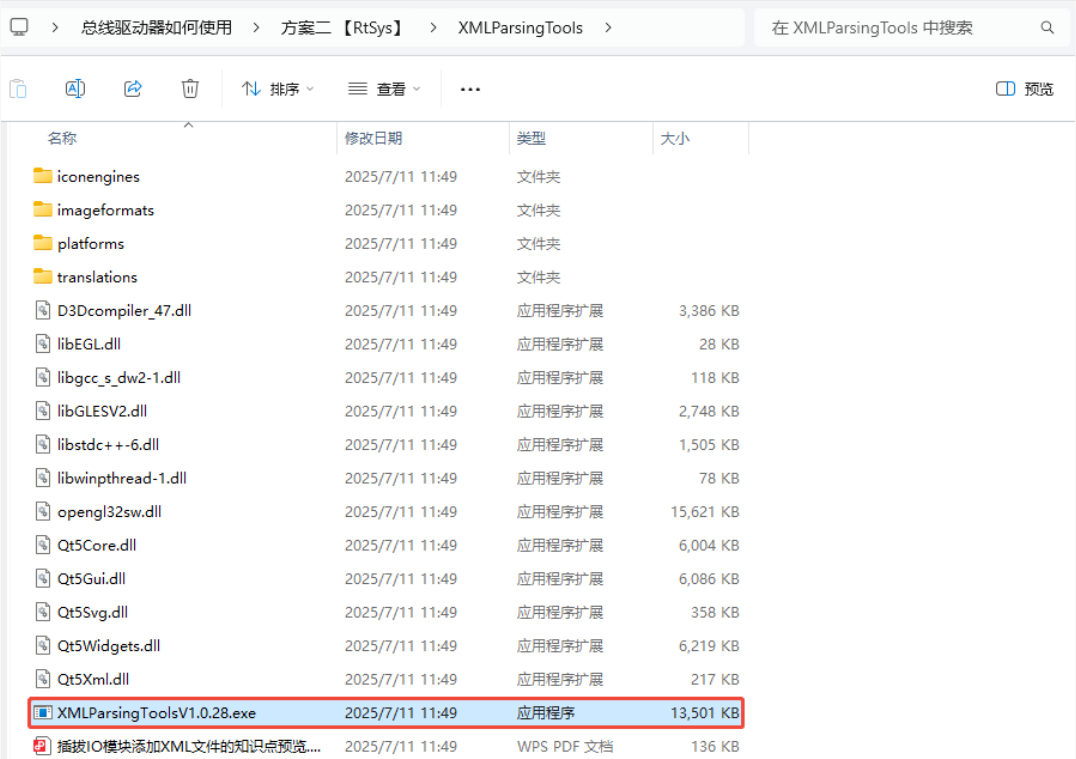
3.�p��XMLParsingTools�����\(y��n)��
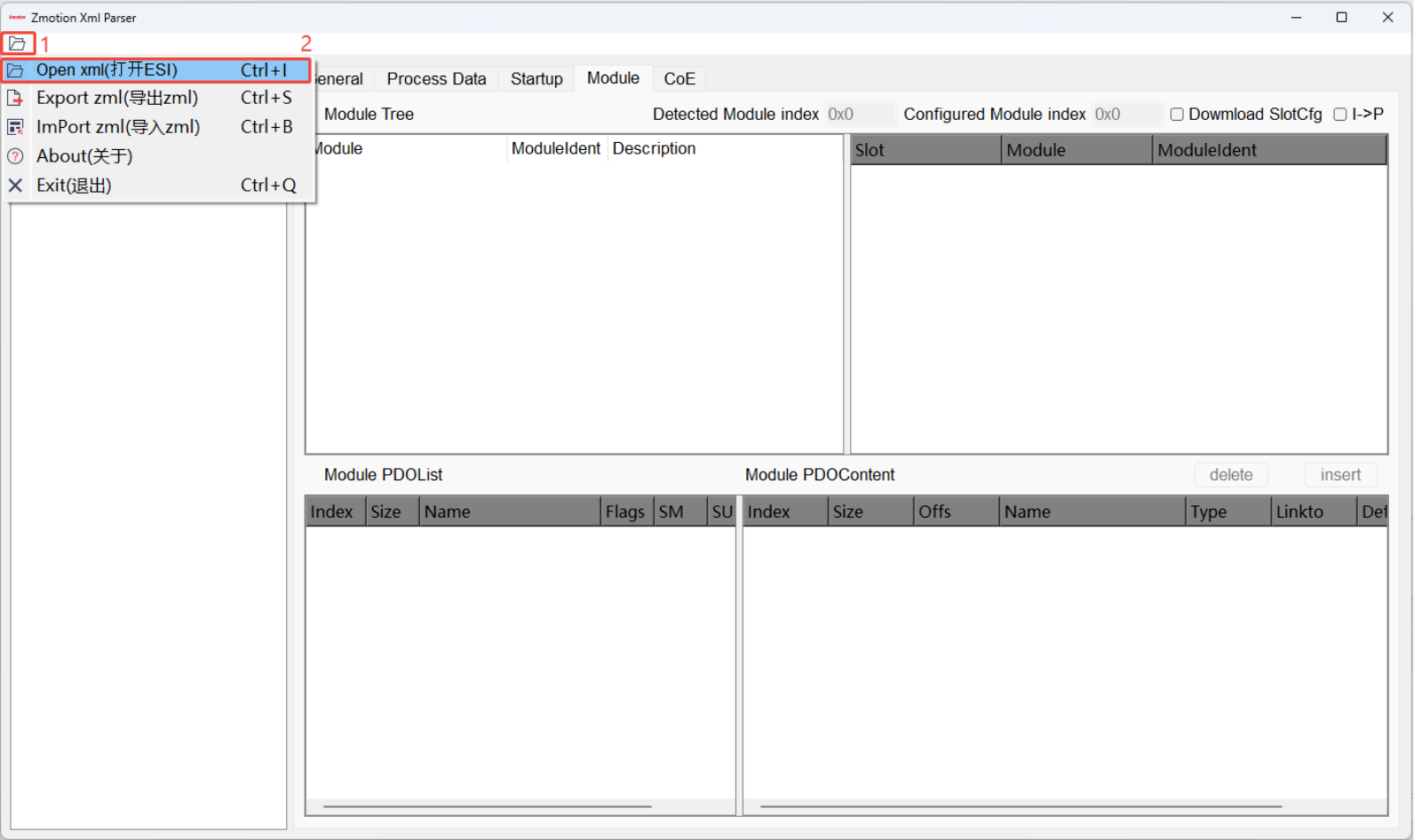
4.�c(di��n)�����Ͻ��ļ��Aλ��-��Open xml����
5.�x����Ҫ�D(zhu��n)�Q��xml�ļ�-�����_����
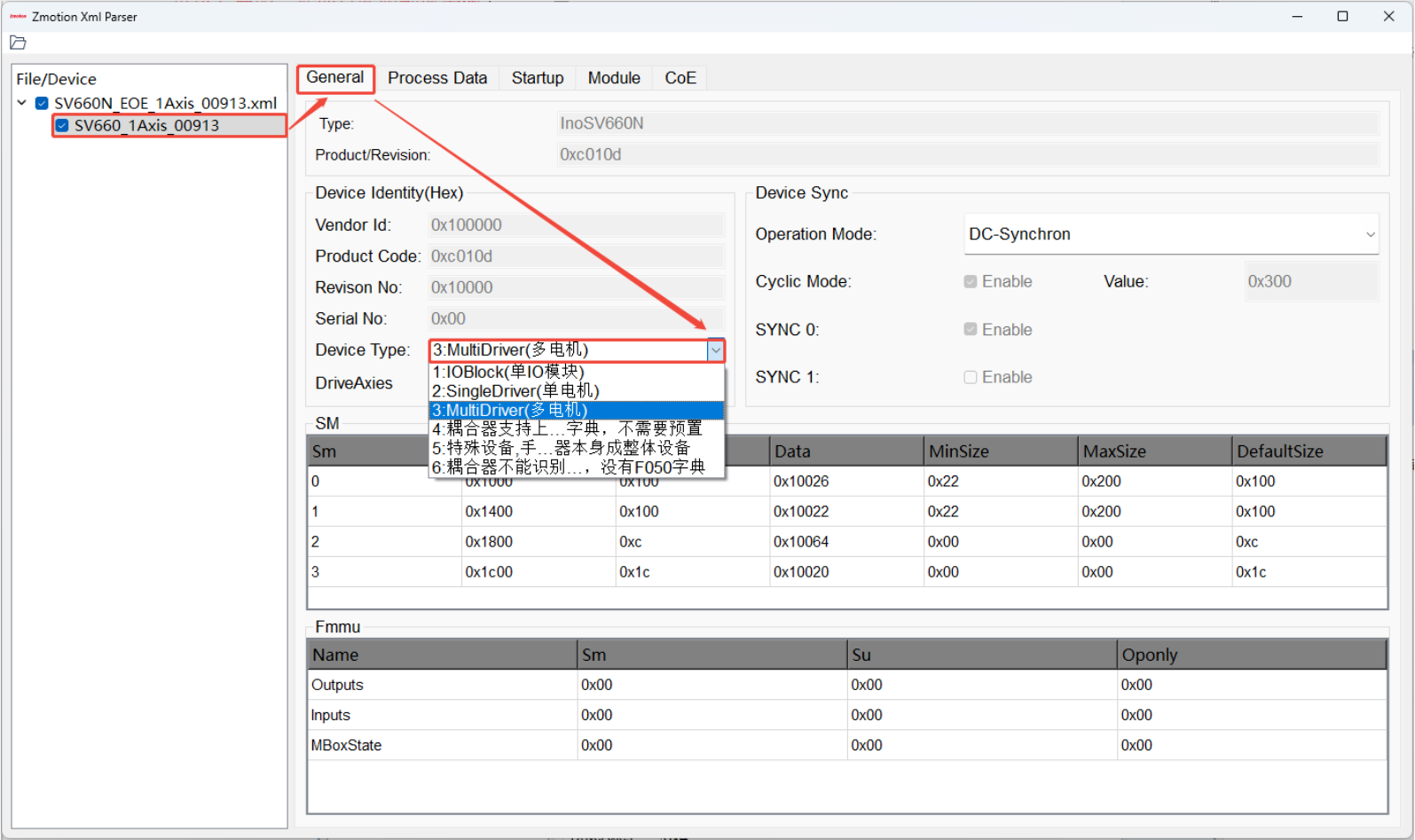
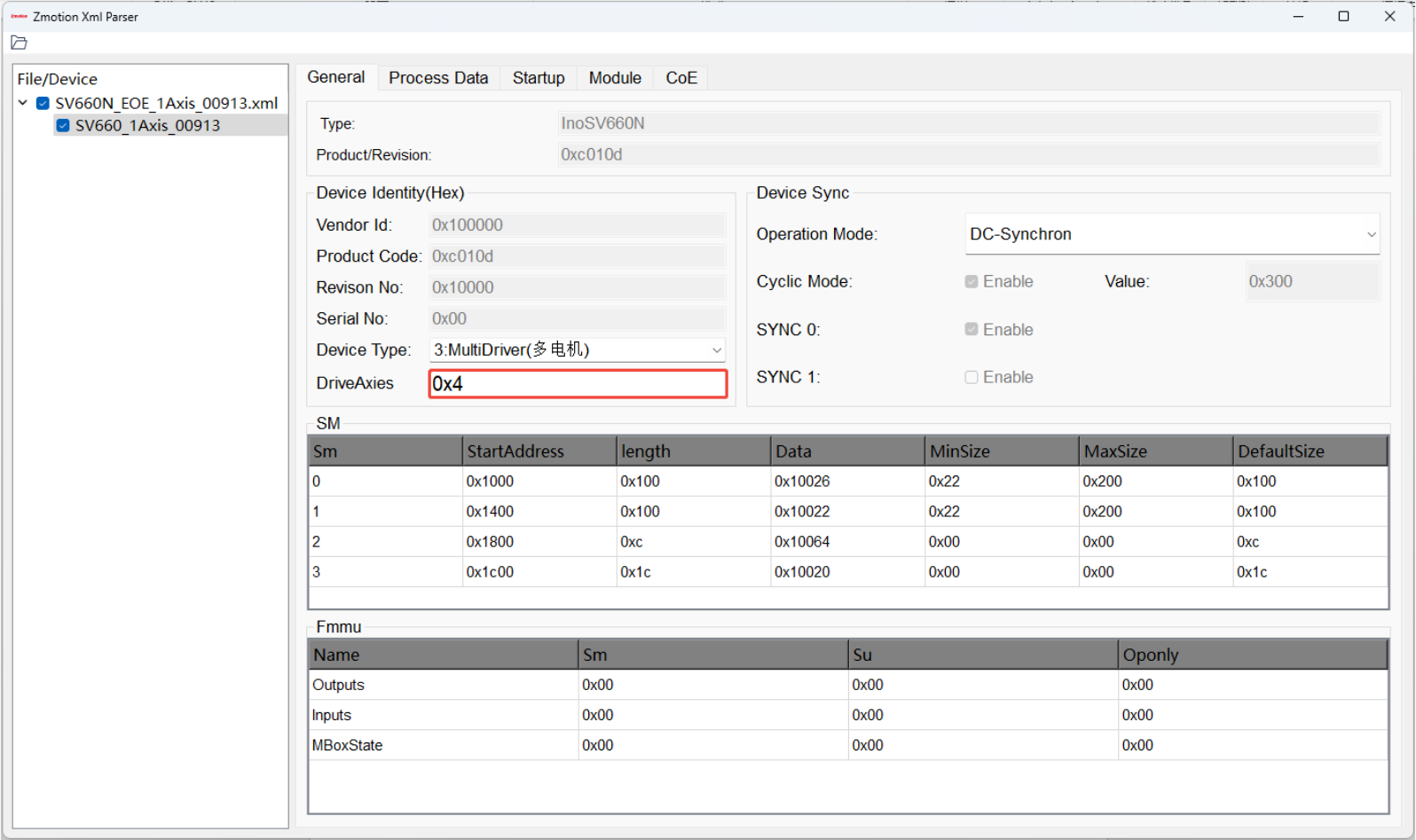
6.���_���x��(du��)��(y��ng)�ď�վ��̖(h��o)����վ��Ͳ��O(sh��)���S��(sh��)���@����һ���Ŀ����(q��)��(d��ng)��������һ��һ���(q��)��(d��ng)��һ�㲻���O(sh��)�ã���
7.�c(di��n)�����Ͻ��ļ��Aλ��-��Export zml����(d��o)����
8.�x��(du��)��(y��ng)·��-�O(sh��)���ļ����������^20��(g��)�ַ���-�����桿��
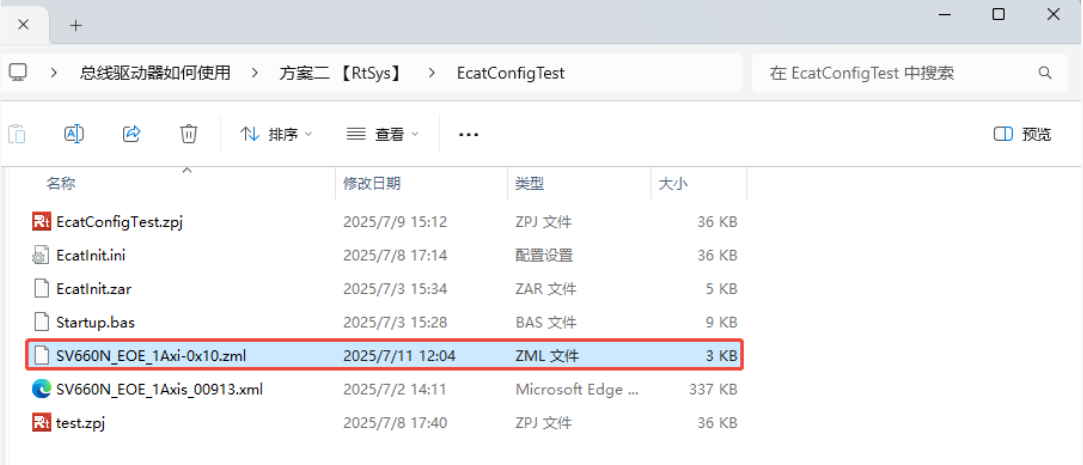
9.���Կ�����(du��)��(y��ng)�ļ��A�Е�(hu��)��һ��(g��)�D(zhu��n)�Q���.zml�ļ���
10.���_RTSys������ҕ�D��→�������ļ���→�����ӵ������ļ�����
11.�x��Ҫ���ӵ�zml�ļ�-�����_���������zml�ļ������ӡ�
��������������Ό�(d��o)����(y��ng)�����������̣� 1.������ҕ�D���p������������/���S���á��ď������ڶ��С���(d��o)�롿������(d��o)�����x�(xi��ng)���������ԡ���������̎�����������ط��IJ������Eһ�ӡ���
��1������(sh��)���ú�֮����Ԍ������õĔ�(sh��)��(j��)����(d��o)�������档
��2���x��(du��)��(y��ng)·����ݔ���ļ������x���桿���ɡ�
2.����(d��o)������.ini�ļ����ԡ���(d��o)�롿�����������̡����E���£�
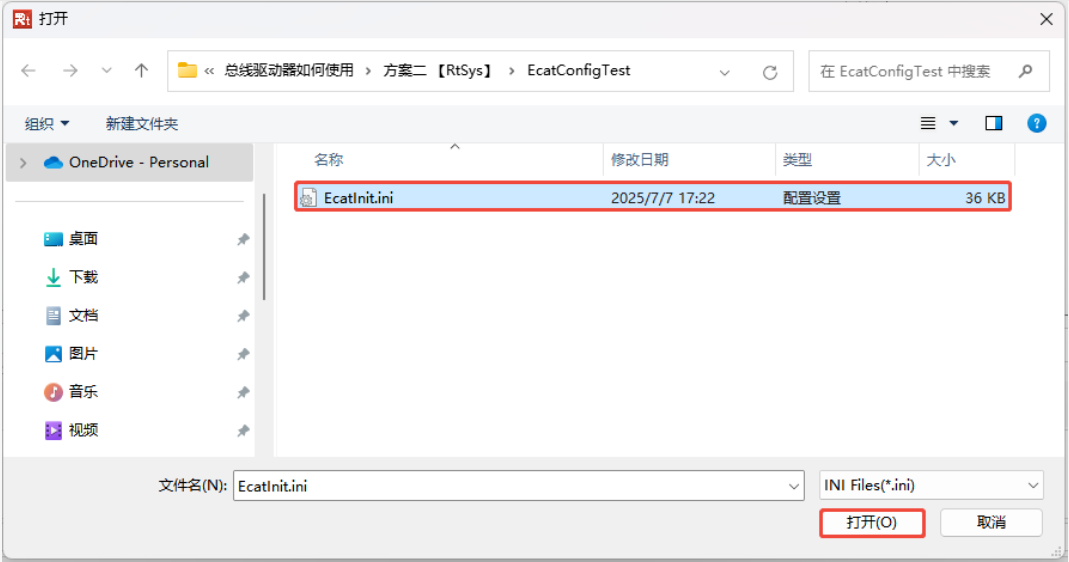
��1���ˆΙ��x���ļ���-�����_���̡���
��2���p������������→����(d��o)�롿��
��3���x����Ҫ�����.ini�(q��)��(d��ng)�������ļ�-�����_����
���D����(d��o)�������Õ�(hu��)�͌�(d��o)�����̵�����һ�¡�
�ġ�PDOģʽ�x�� PDO�O(sh��)�Ô�(sh��)ֵ��(du��)��(y��ng)ģʽ���w����RTSysܛ�����ϽǴ��_�������ęn��→��RTBasic�����փ�(c��)��→ָ�DRIVE_PROFILE���в鿴��
���������������փ�(n��i)�ݣ�PDO����
ÿ��(g��)�S�İl(f��)��pdo����pdo�������x��
����O(sh��)�����_��ATYPE���O(sh��)�Þ�65/66/67���Ժ���ܲ����@��(g��)����(sh��)��
Ԕ��(x��)����Ո(q��ng)��ԃ�S�ҡ�
-1��ʾʹ���(q��)��(d��ng)���ă�(n��i)��ȱʡPDO�б���20160601���ϰ汾֧�֣�ȱʡPDO����0X6060�r(sh��)���o��ʹ��datum(21)����ָ�
-1-�(q��)��(d��ng)��Ĭ�J(r��n)�O(sh��)�ã���Ҫ�������汾 20160601 ������
0-ȱʡ���ã�cspλ��ģʽ
{0x60400010, 0x607a0020, 0x60600008},
//������ Ŀ��(bi��o)λ�� ģʽ
{0x60410010, 0x60640020},
//��B(t��i)�� �����
1-cspλ��ģʽ+���ط���
{0x60400010, 0x607a0020, 0x60600008},
//������ Ŀ��(bi��o)λ�� ģʽ
{0x60410010, 0x60640020, 0x60770010},
//��B(t��i)�� ����λ�� ��(d��ng)ǰ����
2-cspλ��ģʽ+���ط���+�i��1up
{0x60400010, 0x607a0020, 0x60b80010, 0x60600008},
//������ Ŀ��(bi��o)λ�� probe�O(sh��)�� ģʽ
{0x60410010, 0x60640020, 0x60770010, 0x60b90010, 0x60ba0020},
//��B(t��i)�� ����λ�� ��(d��ng)ǰ���� probe��B(t��i) probeλ��
3-cspλ��ģʽ+��������+���ط���+�i��1������
{0x60400010, 0x607a0020, 0x60b80010, 0x60720010, 0x60600008},
//������ Ŀ��(bi��o)λ�� probe�O(sh��)�� �������� ģʽ
{0x60410010, 0x60640020, 0x60770010, 0x60b90010, 0x60ba0020},
//��B(t��i)�� ����λ�� ��(d��ng)ǰ���� probe��B(t��i) probeλ��
4-cspλ��ģʽ+���ط���+�(q��)��(d��ng)��IOݔ��
{0x60400010, 0x607a0020, 0x60600008},
//������ Ŀ��(bi��o)λ�� ģʽ
{0x60410010, 0x60640020, 0x60770010, 0x60fd0020},
//��B(t��i)�� ����λ�� ��(d��ng)ǰ���� �(q��)��(d��ng)��IOݔ��
5-cspλ��ģʽ+���ط���+�(q��)��(d��ng)��IOݔ��+�(q��)��(d��ng)��IOݔ��
{0x60400010, 0x607a0020, 0x60fe0120,0x60600008},
//������ Ŀ��(bi��o)λ�� IOݔ�� ģʽ
{0x60410010, 0x60640020, 0x60770010, 0x60fd0020},
//��B(t��i)�� ����λ�� ��(d��ng)ǰ���� �(q��)��(d��ng)��IOݔ��
6-�����(q��)��(d��ng)������
7-�����(q��)��(d��ng)������
8-�����(q��)��(d��ng)������
9-�̼��汾 160504 ֧��
{0x60400010,0x607a0020,0x60fe0120,0x60b80010,0x60720010,0x60600008},
//������ Ŀ��(bi��o)λ�� IOݔ��(32��(g��)) probe�O(sh��)�� �������� ģʽ
{0x60410010,0x60640020,0x60770010,0x60fd0020,x60b90010,0x60ba0020},
//��B(t��i)�� ����λ�� ��(d��ng)ǰ���� �(q��)��(d��ng)��IOݔ��(32��(g��)) probe��B(t��i) probeλ��
10-�̼��汾 160504 ����֧��,��drive_fe����
{0x60400010,0x607a0020,0x60fe0120,0x60b80010,0x60720010,0x60600008},
//������ Ŀ��(bi��o)λ�� IOݔ�� probe�O(sh��)�� �������� ģʽ
{0x60410010,0x60640020,0x60770010,0x60fd0020,0x60b90010,0x60ba0020,0x60f40020},
//��B(t��i)�� ����λ�� ��(d��ng)ǰ���� �(q��)��(d��ng)��IOݔ�� probe��B(t��i) probeλ�� drive_fe
11-�̼��汾 160504 ����֧��,probe���Üy(c��)ԇ
{0x60400010, 0x607a0020, 0x60b80010, 0x60600008},
//������ Ŀ��(bi��o)λ�� probe�O(sh��)�� ģʽ
{0x60410010,0x60640020,0x60770010,0x60b90010,0x60ba0020,0x60bb0020, 0x60bc0020, 0x60bd0020},
//��B(t��i)�� ����λ�� ��(d��ng)ǰ���� probe��B(t��i) probeλ��1/λ��2/λ��3/λ��4
12-�̼��汾 160504 ����֧��,�����(q��)��(d��ng)������
{0x60400010, 0x607a0020, 0x60600008},
//������ Ŀ��(bi��o)λ�� ģʽ
{0x60410010, 0x60640020, 0x60fd0020},
//��B(t��i)�� ����λ�� �(q��)��(d��ng)��IOݔ��
13-�̼��汾 160504 ����֧��,���ٶ�ǰ���c���ٶ�ǰ��
{0x60400010, 0x60B20010, 0x607a0020, 0x60B10020, 0x60600008},
//������ ���ٶ�ǰ�� Ŀ��(bi��o)λ�� �ٶ�ǰ�� ģʽ
{0x60410010, 0x60640020, 0x60770010, 0x60fd0020, 0x606c0020},
//��B(t��i)�� ����λ�� ��(d��ng)ǰ���� �(q��)��(d��ng)��IOݔ�� ��(sh��)�H�ٶ�
17-�̼��汾160504����֧�֣�csp/csv/cst���Nģʽ�����ГQ
{0x60400010,0x60710010,0x60ff0020,0x607a0020,0x60b80010,0x60720010, x60600008},
//������ �������� �����ٶ� Ŀ��(bi��o)λ�� probe�O(sh��)�� �������� ģʽ
{0x60410010,0x60770010,0x60640020,0x60fd0020,0x60b90010,0x60ba0020, x60bb0020},
//��B(t��i)�� ��(d��ng)ǰ���� ����λ�� �(q��)��(d��ng)��IOݔ�� probe��B(t��i) probeλ��1/λ��2/
18-�̼��汾160504����֧��,csp/csv/cst���Nģʽ�����ГQ+���ط���?zh��n)xȡ
{0x60400010,0x60710010,0x60ff0020,0x607a0020,0x60b80010,0x60720010,0x60600008},
//������ �������� �����ٶ� Ŀ��(bi��o)λ�� probe�O(sh��)�� �������� ģʽ
{0x60410010,0x60770010,0x60640020,0x60fd0020,0x60b90010,0x60ba0020,0x60bb0020, 0x60bc0020, 0x60bd0020},
//��B(t��i)�� ��(d��ng)ǰ���� ����λ�� �(q��)��(d��ng)��IOݔ�� probe��B(t��i) probeλ��1/λ��2/
probe�3/�4
20-�̼��汾 160504 ����֧��,cspλ��+csv�ٶ�
{0x60400010, 0x60ff0020, 0x607a0020, 0x60600008},
//������ Ŀ��(bi��o)�ٶ� Ŀ��(bi��o)λ�� ģʽ
{0x60410010, 0x60640020},
//��B(t��i)�� �����
21-�̼��汾 160504 ����֧��,cspλ��+csv�ٶ�+���ط���
{0x60400010,0x60ff0020,0x607a0020,0x60600008},
//������ Ŀ��(bi��o)�ٶ� Ŀ��(bi��o)λ�� ģʽ
{0x60410010,0x60640020,0x60770010},
//��B(t��i)�� ����λ�� ��(d��ng)ǰ����
22-�̼��汾 160504 ����֧��,cspλ��+csv�ٶ�+���ط���+ɫ��(bi��o)�i��1������
{0x60400010, 0x60ff0020, 0x607a0020, 0x60b80010, 0x60600008},
//������ Ŀ��(bi��o)�ٶ� Ŀ��(bi��o)λ�� probe�O(sh��)�� ģʽ
{0x60410010, 0x60640020, 0x60770010, 0x60b90010, 0x60ba0020},
//��B(t��i)�� ����λ�� ��(d��ng)ǰ���� probe��B(t��i) probeλ��
23-�̼��汾 160504 ����֧��,cspλ��+csv�ٶ�+���ط���+�i��1������+��������
{0x60400010,0x60ff0020,0x607a0020,0x60b80010,0x60720010,0x60600008},
//������ Ŀ��(bi��o)�ٶ� Ŀ��(bi��o)λ�� probe�O(sh��)�� �������� ģʽ
{0x60410010,0x60640020, 0x60770010,0x60b90010,0x60ba0020},
//��B(t��i)�� ����λ�� ��(d��ng)ǰ���� probe��B(t��i) probeλ��
24-�̼��汾 160504 ����֧��,cspλ��+csv�ٶ�+IOݔ��+λ��+���ط���
{0x60400010, 0x60ff0020, 0x607a0020, 0x60600008},
//������ Ŀ��(bi��o)�ٶ� Ŀ��(bi��o)λ�� ģʽ
{0x60410010, 0x60640020, 0x60770010, 0x60fd0020},
//��B(t��i)�� ����λ�� ��(d��ng)ǰ���� �(q��)��(d��ng)��IOݔ��
25-�̼��汾 160504 ����֧��,cspλ��+csv�ٶ�+IOݔ��+λ��+���ط���
{0x60400010, 0x60ff0020, 0x607a0020, 0x60fe0120,0x60600008},
//������ Ŀ��(bi��o)�ٶ� Ŀ��(bi��o)λ�� �(q��)��(d��ng)��IOݔ�� ģʽ
{0x60410010, 0x60640020, 0x60770010, 0x60fd0020},
//��B(t��i)�� ����λ�� ��(d��ng)ǰ���� �(q��)��(d��ng)��IOݔ��
30-�̼��汾 160504 ����֧��,cspλ��+cst�D(zhu��n)��
{0x60400010, 0x60710010, 0x607a0020, 0x60600008},
//������ Ŀ��(bi��o)�D(zhu��n)�� Ŀ��(bi��o)λ�� ģʽ
{0x60410010, 0x60640020},
//��B(t��i)�� �����
31-�̼��汾 160504 ����֧��,cspλ��+cst�D(zhu��n)��+���ط���
{0x60400010,0x60710010,0x607a0020,0x60600008},
//������ Ŀ��(bi��o)���� Ŀ��(bi��o)λ�� ģʽ
{0x60410010,0x60640020,0x60770010},
//��B(t��i)�� ����λ�� ��(d��ng)ǰ����
32-�̼��汾 160504 ����֧��,cspλ��+cst�D(zhu��n)��+���ط���+�i��1������
{0x60400010, 0x60710010, 0x607a0020, 0x60b80010 , 0x60600008},
//������ Ŀ��(bi��o)�D(zhu��n)�� Ŀ��(bi��o)λ�� probe�O(sh��)�� ģʽ
{0x60410010, 0x60640020, 0x60770010, 0x60b90010, 0x60ba0020},
//��B(t��i)�� ����λ�� ��(d��ng)ǰ���� probe��B(t��i) probeλ��
33-�̼��汾 160504 ����֧��,cspλ��+cst�D(zhu��n)��+���ط���+�i��1������+ ��������
{0x60400010,0x60710010,0x607a0020,0x60b80010,0x60720010,0x60600008},
//������ Ŀ��(bi��o)�D(zhu��n)�� Ŀ��(bi��o)λ�� probe�O(sh��)�� �������� ģʽ
{0x60410010, 0x60640020, 0x60770010, 0x60b90010, 0x60ba0020},
//��B(t��i)�� ����λ�� ��(d��ng)ǰ���� probe��B(t��i) probeλ��
34-�̼��汾 160504 ����֧��,cspλ��+cst�D(zhu��n)��+���ط���+�(q��)��(d��ng)��IOݔ��
{0x60400010, 0x60710010, 0x607a0020, 0x60600008},
//������ Ŀ��(bi��o)�D(zhu��n)�� Ŀ��(bi��o)λ�� ģʽ
{0x60410010, 0x60640020, 0x60770010, 0x60fd0020},
//��B(t��i)�� ����λ�� ��(d��ng)ǰ���� �(q��)��(d��ng)��IOݔ��
35-�̼��汾 160504 ����֧��,cspλ��+cst�D(zhu��n)��+���ط���+IOݔ��+IOݔ��
{0x60400010, 0x60710010, 0x607a0020, 0x60fe0120,0x60600008},
//������ Ŀ��(bi��o)�D(zhu��n)�� Ŀ��(bi��o)λ�� �(q��)��(d��ng)��IOݔ�� ģʽ
{0x60410010, 0x60640020, 0x60770010, 0x60fd0020},
//��B(t��i)�� ����λ�� ��(d��ng)ǰ���� �(q��)��(d��ng)��IOݔ��
�̌W(xu��)ҕ�lՈ(q��ng)�c(di��n)��→���������\(y��n)��(d��ng)���Ƽ����_�l(f��)ƽ�_(t��i)RTSys(��):EtherCAT������������